Ընդհանուր տեղեկություններ եւ շարժակների դասակարգում: Gears
Gears
Շինարարական աշխատանքներ
Փոխել եւ փոխարինել շարժակների
Ձեռնարկների վերանորոգման մեխանիզմներ
Gears
Մաշված եւ վերանորոգված շարժիչներ
Հղումներ
1. GEARS
1.1 Շինարարություն
Շարժիչները օգտագործվում են գրեթե բոլոր մեխանիզմներով, որոնցով հագեցված են մետալուրգիական սեմինարները (կռունկներ եւ վերելակներ, ռոլլ-սեղաններ, լարախաղացներ, դյուրակիր կրիչներ եւ այլն)
Առանցքային մասերի հիմնական մասերը ցնցուղ են (շարժակների): Նրանք ծառայում են ռոտացիայի փոխանցումը մեկ լիսեռից մյուսը, երբ ցցերը միեւնույն առանցքի վրա չեն:
Կախված հանքերի հարաբերական դիրքերից, շարժիչները օգտագործվում են `գլանաձեւ, կոնաձեւ եւ ուղղահայաց:
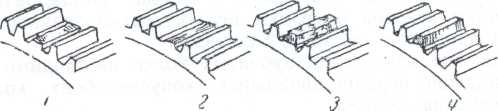
Մի գլանաձեւ շարժիչի շարժիչը ծառայում է ռոտացիայի փոխանցում մեկից մյուսին զուգահեռ լիսեռով (Նկար 1, ա):
Կտրուկ փոխանցման փոխանցման փոխանցումը ծառայում է պտտումը փոխանցումից մինչեւ լիսեռ, որը գտնվում է առանցքների խաչմերուկում (Նկար 1.6):
Ծալքավոր շարժիչը օգտագործվում է պտտումը լիսեռից դեպի լիսեռ փոխանցում, որը տեղակայված է խաչմերուկում, բայց ոչ առանց կտրելու առանցքները (Նկար 1, գ):
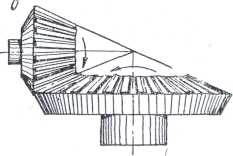
Նկար. 1. շարժակների: a - գլանաձեւ: b - անկյուն: պտուտակով: g - chevron հանդերձում:
Դարբնոցային անիվը եւ ռեյն օգտագործվում են ռոտացիոն շարժումը առաջադեմ վերադարձի մեջ
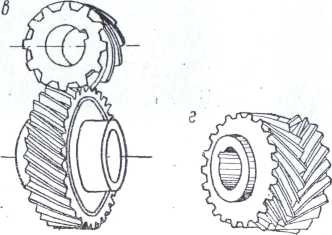
Գլանաձեւ սկավառակների ատամները կարող են ուղիղ լինել (տես 1-ին, ա եւ բ), նեղ ու շվոն (Սուրբ Ծնունդ) - Նկար. 1,
Chevron հանդերձանքը բաղկացած է երկու նրբատախտակներով, որոնք զուգորդված ատամնավոր ատամներով են:
Երբ ուղիղ ատամներով զբաղվում են անիվները, մեկ կամ երկու ատամները միաժամանակ ներգրավված են, ինչի արդյունքում փոխանցման աշխատանքը ուղեկցվում է մի քանի աթոռներով:
Դյուրակիր հանդերձանքի գործողությունը կատարվում է oblique կամ chevron ատամների օգտագործմամբ, քանի որ ներգրավվածության մեջ ներգրավված ատամների թիվը ավելանում է:
Անիվի անիվները պատրաստված են պողպատե կաղապարներից, պողպատե ձուլվածքներից եւ գլանվածքներից կամ երկաթե ձուլվածքներից: Կրիտիկական շարժակների համար (օրինակ, բեռնաթափման մեքենաներ) չպետք է թույլատրվեն պոչամբարների օգտագործումը:
Շարժակազմերի դասակարգումը: Կախված շարժակազմի նպատակը, ատամի տեսակը եւ պտտման արագությունը, շարժումները բաժանված են չորս դասի շարժիչների ճշգրտությամբ, ըստ արտադրության եւ հավաքման թույլատրելիության (աղյուսակ 119):
Աղյուսակ 1 Փոխանցումների դասակարգումը
|
Թույլատրելի է |
||||
|
Փոխատուի տեսակը |
թաղամասի արագությունը |
Նշում |
||
|
աճ, մ / վ |
||||
|
Գլանաձեւ |
Դիմել, որտեղ ճշգրտությունը |
|||
|
եւ հարթությունը չունեն |
||||
|
արժեքները, ինչպես նաեւ |
||||
|
Conic |
ձեռքով եւ ոչ բեռնված |
|||
|
շարժիչներ |
||||
|
Գլանաձեւ |
||||
|
Conic |
||||
|
Գլանաձեւ " |
||||
|
Conic |
||||
|
Գլանաձեւ |
1 Մեծ պահանջներին համապատասխան |
|||
|
1 հարթ փոխանցում |
||||
|
Conic |
ինչպես նաեւ հաշվում |
|||
|
մեխանիզմներ |
Gears- ը բաց է, կես բաց եւ փակ:
Բացել բացված փոխանցումը, որոնք չունեն նավթի բաղնիքի պատյաններ (բաք): նման շարժակների ժամանակահատվածը քսայուղով քսում են: Սովորաբար այդ շարժիչները ցածր արագություն են եւ հիմնականում օգտագործվում են պարզ մեքենաներով եւ մեխանիզմներով:
Կիսահաղորդիչները տարբերվում են բացերից, հեղուկ յուղի լոգանքի համար տանկի առկայությամբ:
Փակ զանգի փոխանցում, որը, ինչպես նաեւ առանցքակալները տեղադրվում են հատուկ սենյակներում:
Փոխանցման տուփի շարժակազմերը տարբեր եղանակներով քսում են.
1) 12-14 մ / վրկ-ճակատային մեթոդից գերազանցող շարժակների ճնշման արագությամբ, անիվների մատակարարման սկավառակի սկավառակի գոտու գոտու մատակարարմամբ,
2) 12 մ / վ-ից ցածր շարժակների շուրջ ծայրամասային արագությունների դեպքում `սեղմելով:
Երբ ծծմբով ծծվելը, պետք է հաշվի առնել հետեւյալը.
ա) զույգի ավելի մեծ հանդերձանքը պետք է ընկղմվի յուղի մեջ երկու-երեք անգամ ատամի բարձրությունը.
բ) եթե փոխանցման տուփը մի քանի փուլ ունի, նավթի մակարդակը որոշվում է `հաշվի առնելով փոխանցման արագությունը:
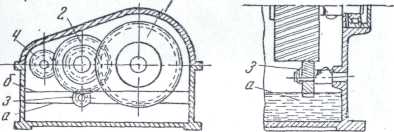
Վերջին դեպքում, բ մակարդակը (տե՜ր 2) թույլատրվում է, երբ ցածր արագության շրջանի շարժիչի շարժիչը պտտվում է ցածր արագությամբ: Միջին եւ խոշոր տպատախտակներում
Նկար. 2. Ջետի յուղային շարժիչներ:
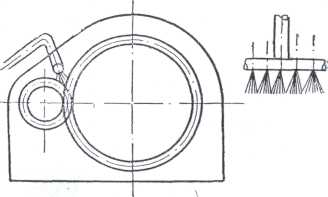
Նկար. 3. Շրջանակային քսայուղի սղոցում:
ցածր անիվների արագությունը, վերջիններս ընկղմվում են երկու կամ երեք անգամ մեծ անիվի ատամների բարձրության վրա, եւ նավթը լցվում է մակարդակի վրա: Առաջին փուլի մակերեւույթը դնում է մի նեղ ատամի հետ օժանդակ շարժիչի անիվը 3, որը քսում է լամպը շարժիչին:
Օդորակիչի թափանցիկությունը ընտրվում է փոխանցման տուփի մեջ, կախված արագությունից եւ բեռնվածությունից, սովորաբար 4-ից մինչեւ 12 ° E, 50 ° C ջերմաստիճանի որոշման ջերմաստիճանում: Ջերմաստիճանի պայմանները, որոնցում գործում է միավորը, նույնպես հաշվի են առնվում. ավելի բարձր ջերմաստիճանի դեպքում օգտագործվում է ավելի բարձր խտության յուղ, իջեցում, ավելի ցածր խտություն:
Բաց դռները սովորաբար քսում են քսուք (քսուք, մշտական, եւ այլն):
Առանցքակալներ եւ փոխանցման տուփի տողերի գծերը (նկարներ), պետք է արվի շատ խնամքով, որպեսզի խուսափեն վառելիքի արտահոսքի եւ փոշու փոխանցումատուփից:
Մաշված եւ վերանորոգված շարժիչներ
Զարդանախշերը չեն կարողանում երկու հիմնական պատճառներով. Ատամների հագուստը եւ դրանց խանգարումները:
Հագնում սովորաբար արդյունք է հետեւյալը. 1) անավարտ հարթություն եւ 2) շփում (աստիճանական հագնում):
Առաջին դեպքում գործածելը հիմնականում վատ տեղադրման արդյունք է եւ սովորաբար բացակայում է (ռադիկալ մաքրության խիստ պահպանումը) սովորաբար բացակայում է: Այնուամենայնիվ, ճառագայթային մաքրման փոփոխությունը կարող է լինել նաեւ կրող ռումբերի զարգացման հետեւանքով, եւ առանցքակալների մշակման արդյունքում կարող է լինել կամ բարձրացնել ռադիալեզու մաքրման կամ դրա նվազեցման (շահագործման):
Եթե օդանավերի վրա բեռնվածքը փոխանցվում է կողմերին, աշխատանքների ընթացքում զուգակցվում են որպես ինքնաթիռներ, հնարավոր է, որ ռադիացիոն մաքրման աճը լինի:
Եթե լվացքի վրա բեռնվածքը փոխանցվում է կորդոնի կողմը (օրինակ, կռունկի շարժիչի շարժակների մեջ, որը ձեւավորվում է որպես ինքնաթիռի աշխատասեղանի մշակման գործընթացում (սահեցրած ինքնաթիռի այս օրինակում), կարող է կրճատվել ճառագայթումը:
Երկու դեպքում էլ օդափոխիչի փոփոխությունից հետո վերականգնվում է ճառագայթային մաքրումը:
Ավելի մեծ շփումից աստիճանական հագնելը կախված է մի շարք պայմաններից, ներառյալ նյութերի կարծրությունը, որից պատրաստված են շարժիչները, ջերմային բուժումը, քսանյութի ճիշտ ընտրությունը, նավթի անբավարար մաքրությունը եւ անընդհատ փոխելով այն, ծանրաբեռնվածության փոխանցումը եւ այլն:
Իրական տեղադրումը եւ շահագործման ընթացքում լավ վերահսկումը երկարատեւ եւ անխափան սարքավորումների շահագործման հիմնական պայմաններն են:
Ատամների ատամների խափանումները տեղի են ունենում հետեւյալ պատճառներով. Ատամների ծանրաբեռնվածություն, միակողմանի (ատամի մի ծայրից) բեռը, ատամը կտրելը, աշխատակազմի նյութի եւ միկրոշրջանների աննկատելի ճեղքվածքները, վատ կատարված ջերմային բուժման արդյունքում, մետաղից թույլ տեւողությամբ դիմադրություն (մասնավորապես, ձուլման անջատման արդյունքում) եւ կաղապարները), աճող ցնցումներ, հարվածներ պինդ օբյեկտների ատամների եւ այլն:
2.1 Փոխարինող սարքերի փոխարինում եւ վերանորոգում:

Նկար. 4. Ատամների վերանորոգում պտուտակահանների միջոցով, որոնք հետեւում են եռակցման
Որպես կանոն, մաշված եւ կոտրված ատամները չպետք է վերանորոգվեն, այլ փոխարինվեն, եւ խորհուրդ է տրվում փոխել երկու անիվները միեւնույն ժամանակ: Այնուամենայնիվ, երբ մեծ անիվը մեխանիզմում մեծ քանակությամբ է, քան փոքրը, անհրաժեշտ է փոխարինել փոքր անիվը ժամանակին, որն ավելի արագ է հագնում, քան մեծ տիեզերական հարաբերակցությունը: Փոքր անիվի ժամանակի փոխարինումը մեծ անիվը պաշտպանելու է հագուստից:
Սարքավորման ատամների կրելը չպետք է գերազանցի 10-20% -ը. Ատամի հաստությունը, հաշվի առնելով նախնական շրջանագծի կորի երկայնքով: Ցածր արձագանքման շարժակների մեջ ատամի հագուստը թույլատրվում է մինչեւ 30% ատամների հաստության, պատասխանատու մեխանիզմների շարժիչների մեջ շատ ավելի ցածր է (օրինակ, բեռնվածքի մեխանիզմների համար, հագուստը չպետք է գերազանցի 15% -ը, ատամի հաստությունը, մինչեւ 10% »)
Ցեմենտ ատամներով շարժիչները պետք է փոխարինվեն այն ժամանակ, երբ ցեմենտային շերտը մաշված է հաստության 80% -ից ավելի, ինչպես նաեւ ցեմենտավորված շերտի քայքայումից, փաթաթումից կամ փռումից:
Եթե ատամները կոտրվում են, բայց ոչ ավելի, քան երկու անընդմեջ ոչ պակաս կարեւոր շարժակների մեջ (օրինակ, կռունկի շարժման մեխանիզմներ), դրանք կարող են վերականգնվել հետեւյալ կերպ. Կոտրված ատամները կտրված են գետնին, երկու կամ երեք անցք են ատամների լայնությամբ, նրանք պատրաստում են գամասեղներ եւ պտտվում են պատրաստված անցքեր, փաթաթում գամասեղներ են հանդերձում եւ weld մետաղը օգտագործելով էլեկտրական եռակցման, տալով այն ձեւի մի ատամ, մի հատվածի կտրում, ֆրեզերային կամ planing մեքենա կամ հանձնելով կցել զոդում մետաղական ատամի ձեւը եւ ապա վերականգնել մի Օգտվող խոնարհել ստուգվել կալանք կտոր եւ ձեւանմուշ.
Ատամի վերականգնման գործողությունների հաջորդականությունը եռակցման միջոցով ցույց է տրված: 298:
L-հազվագյուտ եւ խոշոր մոդուլների ատամների հետփայլ բուժման գործընթացը հեշտացնելու համար խորհուրդ է տրվում նրանց զարդարել
Նկար. 5. Ատամների եռակցման ժամանակ գործողությունների հերթականությունը.
1 - կոտրված ատամը. 2 - կտրված ատամի տեղը; 3 - եռակցված ատամը կրունկների վրա; 4- բուժված (sawed) ատամը:
պղնձի նմուշը (Նկար 299), որի օգտագործումը հիմնված է այն փաստի վրա, որ պտտման ձեւերի ձեւավորմամբ պղնձի ձեւը կազմում է ատամի եզրերը: Պղնձի բարձր ջերմահաղորդականության շնորհիվ եռակցման ժամանակ մետաղը չի welded է ձեւանմուշ, եւ հետո կափարիչը մակերեսը հեշտությամբ հեռացվում է, եւ weld մետաղը welded է ձեւավորել ատամի ձեւը:
![]()
Նկար. 6. Ատամների եռակցման մեթոդով եռակցման միջոցով.
1 - վերանորոգման հանդերձում;
2 - weld ատամը; 3 - պղնձի նմուշ:
Surfacing- ը պարտադիր պետք է իրականացվի ապրանքանիշի բարձրորակ (մածուցիկ) էլեկտրոդներով, որոնք ոչ ավելի ցածր են: Մակերեւույթից հետո, ցանկալի է այրումը:
Հատուկ կարեւոր մեխանիզմների համար (օրինակ, կռունկների վերացման մեխանիզմներ), թույլ չեն տալիս ատամների մակերեւույթը (վերանորոգումը), այդ դեպքերում տրված անիվները պետք է փոխարինվեն նորերով:
Մի ամրացրեք տարբեր տեսակի ատամները պտուտակներով, առանց եռակցման կամ փորագրության ձեւի մեջ, քանի որ այդ մեթոդները անվստահելի են եւ չեն ապահովում սարքավորումների նորմալ աշխատանքը:
Դարբնոցային շարժիչներով շարժիչները սովորաբար վերանորոգվում են ետով, եռակցման տեխնոլոգիաներով, այնպես, որ եռակցման արդյունքում լրացուցիչ սթրես չի առաջանում, ինչը հանգեցնում է այլ անիվի տարրերի ճաքերի առաջացմանը (խորհուրդ է տրվում, որ ողջ հանդերձը պետք է տաքացվի կարմիր տաքացվողի, նաեւ այրվելուց հետո):
Խողովակի մեջ ճեղքված շարժիչները վերանորոգվում են պողպատի բռնակի կենտրոնի վրա, հատուկ դարբնոցային կամ վերամշակված մեքենայի վրա, ջեռուցվում է մինչեւ 300-400 ° C:
Հատկապես կարեւոր շարժակների շարժիչներ (օրինակ, կռունկների վերացման մեխանիզմներ), որոնք ունեն «ճարպ» ճեղքեր, փոխարինվում են խոսնակը եւ հանգույցը. արգելվում է եռակցման կամ այլ եղանակով վերանորոգումը:
Բարձր արագությամբ պտտվող շարժակազմերը, ինչպես նաեւ մեծ տրամագծով շարժիչները միջին արագությամբ պետք է ենթարկվեն ստատիկ հավասարակշռման:
2.2 Արագության վերանորոգման մեխանիզմներ
Բարձր արագությամբ վերանորոգման շարժիչները, ինչպես նաեւ այլ սարքավորումները, ըստ. նրա տեխնիկան պետք է լինի նոտալ:
Երբ բարձր արագության կոճղերի վերանորոգումը փոխարինում է անհատական շարժակների կամ շարժակների փոխարեն, դրանք չեն փոխարինվում նախապես հավաքված հանգույցներով, եւ, ինչպես նշվեց ավելի վաղ, հաշվի առնելով, որ հանգույցների տեսակները, որպես վերանորոգման եւ տեղադրման միավոր, կարող են լինել երեք:
խոշոր հանգույցները, որոնք ներառում են վիճելի դեպքեր
(օրինակ, փոխանցման տուփի տնակները) եւ այդ տանիքների մեջ տեղադրված ամբողջ հանդերձանքը,
մի խումբ փոխկապակցված անհատական հանգույցների հատկացման օգնությամբ (օրինակ, հանքեր, դրվածքներ, 2, 3, դրանց հետ միասին, դրանց վրա տեղադրված մասերը);
անհատական անհատական հանգույցներ, որոնք ներառում են շարժակների:
Կախված կոնկրետ պայմաններից, որոնք վերանորոգման բնութագրիչ են, որոշվում են կոմբինացիայի կոնկրետ տեսակներից մեկը `աշխատանքի կազմակերպման պլանում:
Ամենակարեւորը արագընթաց վերանորոգումն է, որն իրականացվում է անհատական խոշոր հանգույցների փոխակերպման տուփերի փոխարինմամբ:
Այնուամենայնիվ, այս դեպքում անհրաժեշտ է, որ առաջին հերթին, ապամոնտաժվող եւ վերակառուցվող փոխանցումատուփերը պետք է փոխարինելի լինեն, եւ, երկրորդ հերթին, համապատասխան կեղծող սարքավորումները նախապես պատրաստվեն:
Փոխանցման տուփերի տպագրումը, այսինքն, տվյալ սեմինարի կամ ձեռնարկության հաստատումը որպես փոխարինելի փոխանցման տուփերի որոշակի տեսակների եւ չափերի մի ամբողջություն, ապահովում է բարձրակարգ, բարձրորակ վերանորոգման ապահովման կարեւորագույն միջոց:
Հղումներ
Հավաքովի մեքենաներ `ծանր տեխնիկայով / B.V. Ֆեոդորով, Վ.Ա. Վավուլենկո եւ այլք, 2-րդ հրատարակություն, Մ. Մաշ-ե, 1987:
Տեխնոլոգիաներ արտադրող ձեռնարկի ձեռնարկը `2 տոննա, խմբագրվել է Ա. Կոսիլովա Մ. Մաշ-ե, 1985:
Մետաղ կտրող մեքենաներ: Ուսուցում Տեխնիկական քոլեջների ձեռնարկը: Ն.Ս. Կոլեւը եւ ուրիշներ: Մոսկվա. Mash-ie, 1980 թ.
Սխիրլաթաձեի, Նովիկով Վ.Յու, Տուլաեւ Յու.Ի. Մեքենաների արտադրության տեխնոլոգիական սարքավորումները: Ուսուցում Նպաստել: Մ.: «Ստանկին» հրատարակչությունը, 1997 թ.
Նմանատիպ ակնարկներ.
Շարժիչի ընտրություն, կինեմատիկական հաշվարկ եւ շարժիչի միացում: Պտտման արագության եւ փոխանցման տուփի հաստոցների եւ թմբուկի անկյունային արագությունը: Հաշվարկային հանդերձում: Ատամների դիմացկունություն ճկման սթրեսների վրա: Հղիության կորստի հաշվարկը:
Օդորակիչների դասակարգումը գործառնական նպատակներով: Tolerance համակարգը խթանող շարժակների համար: Մեքենաների եւ շարժակների վերահսկման մեթոդներ եւ միջոցներ: Սրիչի շարժակների վերահսկման սարքեր, դրանց կիրառման կիրառման մեթոդներ:
Վարորդի ծառայության ժամկետը հաշվարկը: Շարժիչի ընտրություն, քերիչի կինեմատիկական հաշվարկ: Նյութերի ընտրության նյութեր: Թույլատրելի սթրեսի որոշում: Հաշվարկի փակ փաթաթման հանդերձում: Կտրուկ շարժակների հանդերձում ուժերի որոշում:
Ցանցային երկաստիճան տուփի դիզայնի ուսումնասիրություն, ընդհանուր եւ միացնող չափումների չափում: Մարման պարամետրերի որոշում: Ուղեւորի թույլատրելի բեռի հաշվարկը փոխանցման շփման տոկունության ապահովման պայմաններից:
Spur շղթայական դիզայն: Շարժիչի շարժիչի ընտրություն: Վտանգավոր հանդերձում ատամի հատվածում հաշվարկված կռում սթրեսը: Դիդի եւ մարմնի տարրերի կառուցողական չափսերը: Փոխանցման զույգերի հիմնական պարամետրերը: Հանքերի մոտավոր հաշվարկ:
Կինեմատիկ, ուժային հաշվարկներ քշել: Սնուցող լիսեռի վրա իշխանության որոշում: Շարժիչի լիսեռի գնահատված հզորության որոշում: Ուղղորդիչի լիսեռի ռոտացիայի հաճախականության որոշում: Փակված գլանաձեւ շարժակների հաշվարկը:
Անջատիչ-լծակ մեխանիզմները օգտագործվում են պտտվող կամ թարգմանչական շարժման մեջ ցանկացած շարժման մեջ պահանջվող պարամետրերով: Friction - փոխել շրջանառության միջնորդության արագությունը կամ շրջադարձը թարգմանել:
Սարքավորման կտրվածքի տեսական հիմքերի ուսումնասիրությունը, վառելիքի դարակով վարելով: Սարքի օգտագործմամբ անիվների պրոֆիլների կառուցում: Ցանցային անիվի ատամների ֆրեզեր: Ատամի ձեւը կախված է օֆսեթից: Երկաթուղու դիրքը անիվի նկատմամբ:
Kinematic drive գոտի conveyor. Էլեկտրական շարժիչի քննական հաշվարկը: Էլեկտրաշարժիչների պահանջվող հզորության որոշումը, հանքերի վրա կինեմատիկական հաշվարկների արդյունքները, շարժիչի լիսեռի անկյունային արագությունը: Հաշվարկային հանդերձում:
Սարքավորման մեխանիզմի տեսքի նկարագրությունը: Կինեմատիկ հաշվարկում: Հաղորդման երկրաչափության հաշվարկը եւ դրա մանրամասները: Հզորության հաշվարկման մեխանիզմ Մեխանիզմի հորերից մեկի ուժի ուժի հաշվարկը: Շինանյութերի ընտրություն:
Շարժիչի գնահատված հզորության որոշում, փոխանցման փոխակերպման շարժիչ ուժ: Հաշվարկային հոսանքի հաշվարկը, փոխանցումատուփերի եւ թորիկների միջոցով: Հիփոթեքային շարժիչների դիզայնի հաշվարկը, ստատիկ բեռի հզորության վրա շարժիչի շարժիչները:
Երեք փուլով գլանաձեւ տուփի նախագծման մեթոդ. Թույլատրելի սթրեսի որոշման կարգը: 3 արագությամբ փոխանցման տուփի, միջանկյալ հանքերի եւ դրանց համար նախատեսված շարժիչների հաշվարկման առանձնահատկությունները: Հիմնական հոդերի ուժերի ստուգման առանձնահատկությունը:
Մթնոլորտային շարժակների առավելությունները եւ թերությունները սովորականից ավելի, շրջանակը: Գործարկման սկզբունքը եւ մոլորակային շարժակների հիմնական ուղիները: Ալիքի շարժիչներ, նախագծման սխեմա, շահագործման սկզբունքը, ալիքի փոխանցման առավելություններն ու թերությունները:
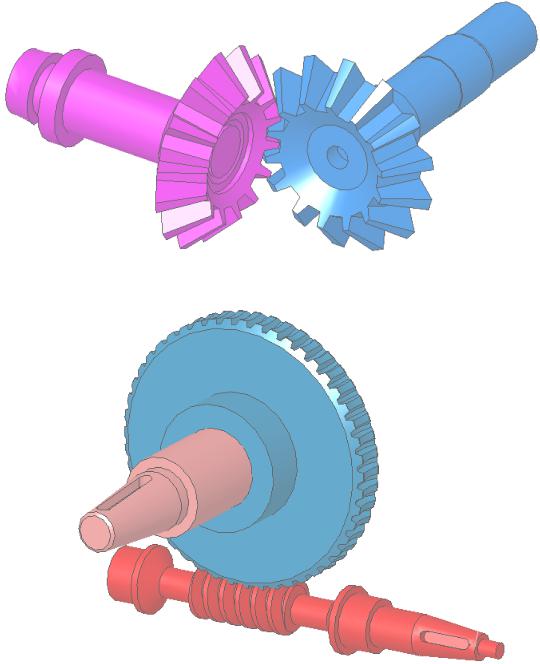
Ցանցային ուղղահայաց շարժիչի շարժիչների պարամետրերը: Շարժիչի նմուշները եւ նյութերը, դրանց չափը եւ ձեւը: Bevel շարժակների եւ նրա երկրաչափական հաշվարկը: Անտառի շարժակների ձեւավորումն ու հաշվարկը: Ճարպի շարժակների հիմնական առավելություններն ու թերությունները:
Worm հանդերձում դիզայն. Դիզայնը գլանաձեւ սոսինձով: Փոխանցման տուփի մահացած ինսուլտի հաշվարկը: Ճշգրիտ շարժիչներ եւ ճիճու շարժիչներ: Դիակների, ճիճուների մակերեսների ձեւի եւ տեղանքի հանդուրժողությունները: Լիսոնի կառուցվածքային տարրերը:
Էլեկտրական շարժիչի փոխանցման եւ ընտրության քնամիային հաշվարկը: Գլանաձեւ փոխանցման հաշվարկը: Հանքերի մոտավոր հաշվարկ: Առանցքային գործի հիմնական չափերի հաշվարկը: Առանցքակալների եւ ագույցների ընտրություն: Առանցքային քսայուղի եւ առանցքակալների ընտրություն:
ՏՐԱՆՍՊՈՐՏԻՑ
P l եւ l - ից c եւ u
1. Ընդհանուր տեղեկություններ:
2. շարժակների դասակարգում:
3. շարժակների երկրաչափական պարամետրերը:
4. Պարամետրերի փոխարկման ճշգրտությունը:
5. Դինամիկ փոխազդեցություններ շարժակների մեջ:
6. Անիվների ձեւավորում: Նյութեր եւ թույլատրելի սթրեսներ:
1. Ընդհանուր տեղեկություններ
Gear գնացքՄի մեխանիզմ է, որը մեխանիզմով փոխանցում է շարժումը, անկյունային արագությունների եւ պահերի փոփոխությամբ: Դարբասարկղը բաղկացած է ատամների անիվների հետ, որոնք միմյանց հետ կողք կողքի են, կազմելով մի շարք հաջորդական մեխանիզմներ:
Շարժակազմերը օգտագործվում են պտտվող շարժման փոխակերպման եւ տեղափոխման համար ցցերի միջեւ, զուգահեռ, խաչմերուկում կամ խաչմերուկում, ինչպես նաեւ շրջադարձային շարժումը թարգմանական եւ հակառակը:
Մեքենաների առավելությունները:
1. Փոխանցման փոխկապակցման կայունությունըi.
2. Աշխատանքի հուսալիություն եւ ամրություն:
3. կոմպակտություն:
4. Փոխանցված արագությունների լայն շրջանակ:
5. Ցածր ճնշում հանքերի վրա:
6. Բարձր արդյունավետություն:
7. Սպասարկման հեշտությունը:
Դարների թերությունները.
1. Բարձր ճշգրտության արտադրության եւ տեղադրման անհրաժեշտությունը:
2. Բարձր արագությամբ աղմուկը:
3. Անսահման փոփոխական փոխանցման հարաբերակցության անհնարինությունը
Նիստեր i.
2. շարժակների դասակարգում
Մեխանիկական համակարգերում օգտագործվող շարժիչները բազմազան են: Դրանք օգտագործվում են այնպես, որ ավելի ցածր եւ բարձրացնեն անկյունային արագությունը:
Փոխակերպման խմբերի փոխանցման ձեւերի դասակարգումը երեք եղանակով.
1. Ըստ ատամների ներգրավման տեսակի. Տեխնիկական սարքերում օգտագործվում են արտաքին (5.1, ա) փոխանցումներ, ներքին (նկ. 5.1, բ) եւ դարակներով (Նկար 5.1, c):
Արտաքին փոխանցման միջոցով փոխանցումը օգտագործվում է պտտվող շարժման փոխակերպման ուղղությամբ փոփոխություն կատարելու համար: Դարբնի հարաբերակցությունը տատանվում է -0.1 i -10-ից: Ներքին հանդերձանքը օգտագործվում է այն դեպքում, երբ անհրաժեշտ է շրջադարձային շարժումը փոխել ուղղությամբ: Արտաքին հանդերձանքով համեմատած, հաղորդումը ունի ավելի փոքր ընդհանուր չափսեր, ավելի մեծ ծածկույթի գործակից եւ ուժեղացված ուժ, բայց ավելի դժվար է արտադրել: Rack gearing- ը օգտագործվում է պտտվող միջնորդության թարգմանության եւ հետադարձման ժամանակ փոխանակման ժամանակ:
2 Վահանի կցորդների փոխադարձ համաձայնությամբ գլանաձեւ սկավառակների փոխանցումը հանքերի զուգահեռ առանցքներով (Նկար 5.1,ա ), կոնցենտրիկ անիվներ, որոնք խաչմերուկներով են (նկար 5.2), հատվածների խաչմերուկներով (նկար 5.3): Կտրուկ շարժակների հետ շարժիչները ունեն ցածր հանդերձանքի հարաբերակցություն (1/6i 6) ավելի դժվար է արտադրել եւ գործել, ունենալ լրացուցիչ առանցքային բեռներ: Պտուտակային անիվները աշխատում են աճող սղոցով, հագնում ավելի արագ, ունեն ցածր բեռնվածություն: Այս մեխանիզմները կարող են ապահովել տարբեր ուղղանկյունային գործակիցներ նույն անիվի տրամագծերի համար:
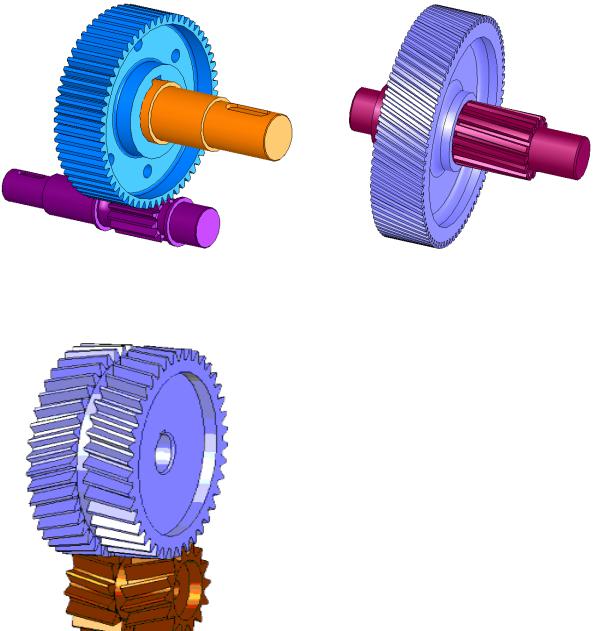
3 Ատամների տեղադրումը համեմատող անիվի եզրին
(տես 5.4, ա), պտուտակավոր շարժիչներ (Նկար 5.4, բ), շվրան (Նկար 5.5) եւ շրջանաձեւ ատամները:
Helical հանդերձանքը մեծ է |
||||
shuya- ի ներգրավվածությունը հարթություն, պակաս |
||||
տեխնոլոգիապես | համարժեք |
|||
խթան, բայց փոխանցման առաջացում է առաջանում |
||||
լրացուցիչ | բեռը: |
|||
Երկակի խոռոչի հանդերձում | հակառակորդը |
|||
թեքված ատամները (քեվրոն) |
||||
cha ունի բոլոր օգուտները պտուտակով |
||||
եւ հավասարակշռված օքսիական ուժեր: Սակայն |
||||
փոխանցումը մի փոքր ավելի դժվար է արտադրել |
||||
lenia- ն եւ տեղադրումը: Curvilinear |
||||
ատամները հաճախ օգտագործվում են ձիու վրա |
||||
շարժիչներ | ընդլայնել |
|||
բեռի հզորությունը | հարթություն |
|||
աշխատել բարձր արագությամբ: |
||||
3. Մեքենաների երկրաչափական պարամետրերը
Դեպի Դրոշի անիվների հիմնական երկրաչափական պարամետրերը (Նկար 5.6) ներառում են `ատամըP t, mod m (m = P t /), ատամների թիվ Z, տրամագծի դ, սկիպիդար դռան, բարձրության h a ատամը բաժանող գլուխ, ատամի բաժանի ոտքի բարձրություն h f, գագաթների եւ խոռոչների շրջանակների տրամագծեր եւ դեղափոխության լայնություն:
df 1 | db 1 | |||
dw 1 (d1) | ||||
da 1 | ||||
df 2 | dw 2 (d2) | da 2 |
||
db 2 | ||||
Դիակի շրջանակի տրամագիծը d = mZ: Անիվի ատամի սկիպիդարը բաժանված է սկիպիդարի գլխին եւ ոտքի ոտքը, որի չափը հարաբերակցությունը որոշվում է անիվի եւ գործիքի պատկերի հարաբերական դիրքով, ատամների կտրման գործընթացում:
Նախնական ուրվագծի զրոյական տեղաշարժով, անջատիչ գլխի բարձրությունը եւ անիվի ատամը համապատասխանում են նախնական կոնտուրի,
ha = h a * m; hf = (h a * + c *) m,
որտեղ h a * ատամի գլխի բարձրության գործակիցն է, c * - ռադիացիոն գործակիցը
Արտաքին ատամներով անիվների համար շրջանագծի տրամագիծը գագաթին է
da = d + 2 հա = (Z + 2 h a *) m.
Խողովակների շրջանակի տրամագիծը
df = d -2 hf = (Z -2 h a * -2 c *) m.
Երբ m ≥ 1 մմ, a * = 1, c * = 0.25, d a = (Z - 2.5) m:
Ներքին ատամներով անիվների համար գագաթների եւ ներքեւի շրջանակների տրամագծերը հետեւյալն են.
da = d -2 ha = (Z -2 h a *) m;
df = d + 2 hf = (Z + 2 h a + 2 c *) m.
Անկյունների հետ զետեղված անիվների համար գագաթների եւ հովիտների տրամագիծը որոշվում է օֆսեթային գործակիցի մեծության հիման վրա `ավելի բարդ կախվածության համար:
Եթե երկու անիվները կտրվեն առանց տեղաշարժի, ապա նրանց սկիպիդարները կխոսեն, այսինքն, կհամընկնեն նախնական շրջանակների հետ: Այս դեպքում ներգրավվածության տեսանկյունը հավասար կլինի նախնական կոնտուրի պրոֆիլի անկյունին, այսինքն, նախնական ոտքերը եւ գլուխները համընկնում են բաժանող ոտքերի եւ գլուխների հետ: Կենտրոնի հեռավորությունը հավասար կլինի բաժանիչ շրջանակների տրամագծով որոշված բաժանարար կենտրոնի հեռավորությանը.
aw = a = (d1 + d2) / 2 = m (Z1 + Z2) / 2:
Անկյունների հետ հատվածների համար տարբերություն կա նախնական եւ սկիպիդար տրամագծերի համար, այսինքն `
d w 1 d 1; d w 2 d 2; w a; αw = α.
4. Պարամետրը փոխակերպման ճշգրտությունը
Ի մեխանիզմների շահագործման ընթացքում տեսականորեն մշտական հանդերձումային հարաբերակցությունը ենթարկվում է շարունակական փոփոխությունների: Այս փոփոխությունները պայմանավորված են ատամների չափերի եւ ձեւի արտադրության անխուսափելի սխալներով: Խախտումների նկատմամբ ցածր զգայունությամբ հանդերձանքի արտադրության խնդիրը լուծվում է երկու ուղղությամբ.
ա) հատուկ տեսակի պրոֆիլների օգտագործումը (օրինակ, ժամային դաստիարակություն);
բ) արտադրական սխալների սահմանափակումը:
Ի Ի տարբերություն պարզ մասերի, ինչպիսիք են հանքերը եւ պտուտակները, շարժիչները բարդ բաղադրիչներ են, եւ դրանց անհատական տարրերի կատարման սխալները ոչ միայն ազդում են երկու առանձին ատամների զուգակցման վրա, այլեւ ազդում են փոխանցման փոխանցման դինամիկ եւ ուժային հատկանիշների վրա, ինչպես նաեւ ճշգրտությամբ պտտվող շարժման փոխանցում եւ վերափոխում:
Շարժիչի եւ շարժակների սխալները, կախված փոխանցման կատարման վրա դրանց ազդեցությունից, կարելի է բաժանել չորս խմբերի.
1) կինեմատիկական ճշգրտության վրա ազդող սխալներ, այսինքն պտտվող շարժման փոխանցման եւ վերափոխման ճշգրտությունը.
2) վնասվածքներ, որոնք ազդում են հանդերձանքի հարթ գործողության վրա.
3) շերտի բիծի ատամների սխալները;
4) սխալներ, որոնք հանգեցնում են կողմնակի մաքրման փոփոխությանը եւ ազդում փոխանցման մահացու հարվածին:
Այս խմբերից յուրաքանչյուրում կարելի է առանձնացնել այն խմբային սխալները, որոնք առավելագույնս բնութագրում են այս խումբը եւ տարրերի կողմից տարրը, մասամբ նկարագրելով փոխանցման ցուցանիշների ցուցանիշները:
Սխալների այս բաժանումները խմբերի մեջ հանդիսանում են հանդուրժողականության չափանիշների եւ շարժակների շեղումների հիմք `ԳՕՍՏ 1643-81 եւ ԳՕՍՏ 9178-81:
Կատարման չափանիշները գնահատելու համար փոխանցման ստանդարտ ճշգրտությունը, սահուն ռոտացիան, ատամների կոնտակտային բնութագրերը եւ դիտարկվող ստանդարտների մեջ մահացած հարվածը հաստատված են 12 աստիճան ճշգրտության արտադրության շարժակների
եւ շարժիչներ: Նվազման աստիճանի ճշգրտության աստիճանները նշված են թվերով: 1-12: 1-ին եւ 2-ի ճշգրտությունը, ըստ ԳՕՍՏ 1643-81-ի m\u003e 1 մմ-ի եւ ԳՕՍՏ 9178-81-ի համար 0.1 Այն թույլատրվում է օգտագործել հանդերձում անիվները եւ շարժիչներ, որոնց սխալ խմբերը կարող են պատկանել տարբեր աստիճանի ճշգրտության: Այնուամենայնիվ, տարբեր խմբերին պատկանող մի շարք սխալներ հաղորդման ճշգրտության վրա իրենց ազդեցության մեջ են, հետեւաբար սահմանափակումներ են կիրառվում ճշգրտության ստանդարտների համադրման վրա: Այսպիսով, հարթության նորմերը կարող են լինել ոչ ավելի, քան երկու աստիճան ավելի ճշգրիտ կամ մեկ աստիճան ավելի կոշտ, քան կինեմատիկական ճշգրտության նորմերը, եւ ատամների շփման դրույքաչափերը կարող են հանձնարարվել ավելի հստակ, քան հարթության նորմերին: Ճշգրտության ստանդարտների համադրությունը թույլ է տալիս դիզայներին ստեղծել ամենաարդյունավետ փոխանցումները, մինչդեռ անհատական ցուցանիշների համար որոշակի աստիճանի ճշգրտության ընտրություն: Հեռախոսներ, որոնք համապատասխանում են այդ փոխանցման գործառնական պահանջներին, ոչ թե գերագնահատելով փոխանցման արտադրության արժեքը: Ճշգրտության աստիճանի ընտրությունը կախված է նպատակից, անիվների կիրառման դաշտից եւ ատամների ռոտացիայի ծայրամասային արագությունից: Եկեք մանրամասնորեն քննարկենք ատամների եւ շարժակների սխալները, որոնք ազդում են դրանց որակի վրա: 5. Դինամիկ փոխազդեցություններ շարժակների մեջ Gears փոխում են ոչ միայն շարժման պարամետրերը, այլեւ բեռի պարամետրերը: Մեխանիկական էներգիայի փոխակերպման գործընթացում, փոխարկիչի ներդրման համար մատակարարվող P Tr- ի մի մասը ծախսվում է շարժական եւ սահող շեղումների հաղթահարման վրա, կինեմատացիոն զույգերի շարժիչների մեջ: Արդյունքում արտադրության հզորությունը նվազում է: Կորուստը գնահատելու համար ուժը օգտագործվում է արդյունավետության (արդյունավետության) հասկացությունը, որը սահմանվում է որպես փոխարկիչի ելքային հզորության հարաբերությունը մուտքագրված էներգիայի նկատմամբ, այսինքն ` η = P դուրս / P մեջ: Եթե հանդերձի շարժիչը փոխակերպում է պտտվող շարժումը, ապա, համապատասխանաբար, մուտքագրման եւ ելքային հզորությունը կարող է սահմանվել որպես Նշեք ωout / ωin ի կողմից, եւ Tout / Tin արժեքը i m- ում, որը մենք կոչում ենք պահերի հարաբերակցությունը: Այնուհետեւ արտահայտությունը (5.3) վերցնում է ձեւը η = i m Η- ի արժեքը տատանվում է 0.94-0.96-ի միջեւ եւ կախված է փոխանցման եւ փոխանցված բեռի տեսակից: Փոխանցման գլանաձեւ փոխանցման համար արդյունավետությունը կարող է որոշվել կախվածության մեջ η = 1 - cf π (1 / Z 1 + 1 / Z 2), որտեղ c- ը ուղղիչ գործոն է, որը հաշվի է առնում փոխանցված իշխանության նվազման հետ արդյունավետության նվազումը, 20T դուրս 292 մZ 2 20 մ հեռավորության վրա 17 մզ 2 որտեղ T o- ն արտադրության պահն է, H մմ, f- ը ատամների միջեւ շփման գործակից է: Հաշվի առեք ատամնավոր ատամների վրա իրական ուժը որոշելու համար Հռոմը բեռնափոխադրման գործընթացն է (Նկար 5.7): Ենթադրենք, որ շարժիչի ներածման պահը T 1 կիրառվում է շարժիչի հանդերձանքը 1, նախնական շրջանագծի տրամագծով, իսկ 2-րդ ղեկի 2-րդ դիմադրության դիմադրության պահին շարժվում է անիվի ռոտացիայի հակառակ ուղղությամբ: Ընդգրկված հանդերձում շփման կետը մշտապես գծի վրա է, որը սովորական է շփման պրոֆիլների համար: Հետեւաբար, ստրուկ ատամի վրա շարժիչ ղեկի ատամի ճնշման ուժը կուղղվի նորմալ երկայնքով: Մենք ուժը փոխանցում ենք գործողությունների գիծը կապի բեւեռին եւ այն բաժանվում է երկու բաղադրիչի: Ֆորտ ' Ֆորտ ' FT- ի շոշափելի բաղադրիչը կոչվում է թաղային ուժը: Նա կատարում է օգտակար աշխատանք, հաղթահարելով դիմադրության T- ի պահը եւ անիվները վարելը: Դրա արժեքը կարելի է հաշվարկել բանաձեւով F t = 2T / d w. Կոմպոնենտը ուղղահայաց է կոչվում ռադիացիոն ուժըեւ նշվում է F- ի կողմից: Աշխատանքի այս ուժը չի կատարում, այն միայն ստեղծում է լրացուցիչ բեռներ հանքերի եւ փոխանցման օժանդակության վրա: Երկու ուժերի չափը որոշելիս ատամների միջեւ շփման ուժերը կարող են անտեսվել: Այս դեպքում ատամների ընդհանուր ճնշման ուժի եւ դրա բաղադրիչների միջեւ գոյություն ունեն հետեւյալ կախվածությունները. F n = F t / (cos α cos); F r = F t tg α / cos, որտեղ α է ներգրավվածության անկյունը: Ձեռնոցների անիվների ներգրավվածությունը ունի մի շարք նշանակալի դինամիկ բացասական կողմեր. Սահմանափակ համընկնման արժեքներ, զգալի աղմուկ եւ ցնցումներ բարձր արագությամբ: Փոխանցման չափը նվազեցնելու եւ աշխատանքների հարթությունը նվազեցնելու համար սփռոցը հաճախ փոխարինվում է պտուտակով, ատամների կողմնակի պրոֆիլները ներգրավված են պտտվող մակերեւույթներին: Ուղղահայաց շարժակների մեջ F- ի ընդհանուր ուժը ուղղված է ատամին ուղղահայաց: Մենք այս ուժը տարանջատենք երկու բաղադրիչի վրա. F t- ը անիվի շրջափուլային ուժն է, իսկ F ա- ն է ղեկի երկրաչափական առանցքի վրա ուղղորդված առանցքային ուժը. F ա = F t tg β, որտեղ է ատամի ընկնելը: Այսպիսով, ի տարբերություն խարսխված հանդերձում, երեք ուղղահայաց ուղղահայաց ուժեր F a, F r, F t, որոնցից միայն F- ը օգտակար աշխատանք է կատարում, գործում է պտուտակավոր ներգրավվածության մեջ: 6. Անիվների ձեւավորում: Նյութեր եւ թույլատրելի սթրեսներ Անիվների ձեւավորում:Գայլերի նախագծման սկզբունքները ուսումնասիրելիս հիմնական նպատակն է վարել անիվների ձեւը եւ հիմնական պարամետրերը որոշելու մեթոդ `ըստ շահագործման եւ շահագործման պայմանների: Այս նպատակին հասնելու հնարավորությունը հնարավոր է լուծել հետեւյալ խնդիրները լուծելու համար. ա) օպտիմալ անիվ նյութերի ընտրություն եւ թույլատրելի մեխանիկական հատկությունների որոշում. բ) անիվի չափերի հաշվարկը, շփման եւ ճկման ուժի պայմաններում. գ) շարժակների դիզայնը: Gears են բնորոշ կերպափոխիչներ, որոնց համար մշակվել են բավականին խելամիտ նախագծման օպտիմալ տարբերակներ: Սարքավորման դիզայնի սինթեզը կարող է ներկայացվել որպես երեք հիմնական կառուցվածքային տարրերի համադրություն `օղակաձեւ հանդերձում, հանգույցը եւ կենտրոնական սկավառակը (Նկար 5.9): Դրոշի ձեւը եւ չափերը որոշվում են կախված ատամների, մոդուլի, լիսեռի տրամագծից, ինչպես նաեւ արտադրական անիվների նյութերի եւ տեխնոլոգիաների քանակից: Նկարում. 5.8-ը ցույց է տալիս շարժակների մեխանիզմների նախագծերի օրինակներ: Անիվների չափերը խորհուրդ են տրվում կատարել ԳՕՍՏ 13733-77 հրահանգներին համապատասխան: Ուսանողներ, ասպիրանտներ, երիտասարդ գիտնականներ, ովքեր օգտագործում են գիտելիքների բազան իրենց ուսումնասիրության եւ աշխատանքի մեջ, շատ շնորհակալ կլինեն ձեզ: Տեղադրվել է http://www.allbest.ru/ Gears Ներածություն հանդերձում ներգրավված փոխանցում Գիտության եւ տեխնոլոգիաների արագ զարգացումը հանգեցնում է նոր նյութերի, նոր տեխնոլոգիական լուծումների առաջացմանը, ինչը թույլ է տալիս ստեղծել նորագույն նախագծեր, սակայն հիմնական մեթոդաբանական դրույթները մնում են անփոփոխ: XI դարում առանձնահատուկ ուշադրություն է դարձվել մեքենաշինության եւ օդանավակայանների արդյունաբերության վրա, եւ այդ կապակցությամբ կցանկանայի անդրադառնալ այս ոլորտներում կիրառվող ընդհանուր նշանակության տարրերին, մասնավորապես, շարժակների վրա: Վերացականակում տրվում է տրված մարմնի սահմանում, դասակարգում, հաշվում են դիդյակի անիվների երկրաչափական պարամետրերի հաշվարկման մեթոդը: Նաեւ այս գրքում նկարագրվում է փոխանցման փոխանցման հանձնարարությունը, տրվում են մեխանիզմների փոխանցման հատկությունները: 1
.
Կենդանաբանական այգումbchatoh անիվը,
դասակարգումը Սարքավորումներ, հանդերձում - փոխանցումատուփի հիմնական մասը, սկավառակի տեսքով, ատամներով, գլանաձեւ կամ կոնյակային մակերեսով, որը կապում է մեկ այլ հանդերձի ատամներին: Մեքենայական ճարտարագիտության մեջ սովորաբար փոքր անվադողերի անվահեծ անվանումն ավելի փոքր թվով ատամների անվանումն է, իսկ մեծ տրված անիվը, որը կոչվում է շարժական անիվ: Այնուամենայնիվ, հաճախ բոլոր հանդերձում անիվները կոչվում են շարժակների: Նկար. 1. Անիվի անիվ Cogwheels սովորաբար օգտագործվում են որպես pram տարբեր թվով ատամների, որպեսզի փոխակերպել մոմենտը եւ հեղեղների քանակը հեղեղների ներդրման եւ արտադրության մեջ: Անիվը, որից դուրս է բերվում մոմենտը, կոչվում է շարժիչը, իսկ անիվը, որը դրված է պահը հանվում է, շարժվում է: Եթե շարժիչի ղեկի տրամագիծը փոքր է, ապա շարժիչի ղեկի մոմենտը մեծանում է պտտման արագության համաչափ նվազումից եւ հակառակը: Փոխանցման տեմպի համաձայն, տորթի ավելացումը կհանգեցնի համակցված տատանումների անկման արագության անկման արագությանը, իսկ արտադրանքը, մեխանիկական ուժը, կմնա անփոփոխ: Այս հարաբերությունը գործում է միայն իդեալական դեպքի համար, որը չի հաշվի առնի շփման կորուստները եւ իրական սարքերի բնորոշ այլ հետեւանքները: A) Տերտերի ատամի պրոֆիլը Անիվների ատամների պրոֆիլը սովորաբար ներառում է կողմնակի կողմը: Այնուամենայնիվ, կան ատամներ, որոնք ունեն ատամների պրոֆիլների շրջանաձեւ ձեւավորում (Novikov հանդերձում մեկ եւ երկու հանդերձամերձ գծերով) եւ ցիկլոիդալ շարժիչներ: Բացի այդ, ատամնավոր մեխանիզմներում օգտագործվում են ատամնաբուժական ատամների պրոֆիլները: Gear պարամետրերը: m - անիվի մոդուլ: Գործունեության մոդուլը կոչվում է գծային քանակ p անգամ ավելի փոքր շրջապատող P դրվագ կամ Pitch- ի հարաբերակցությունը, որն ապահովում է հանդերձանքի ցանկացած համակենտրոն շրջանակ p, այսինքն, մոդուլը `մեկ ատամը մեկ տրամաչափի միլիմետրերի քանակը: Մուգ եւ թեթեւ անիվները ունեն նույն մոդուլը: Ստանդարտացված ամենակարեւոր ցուցանիշը որոշվում է շարժակների ուժային հաշվարկից: Ավելի բեռնված փոխանցումը, այնքան բարձր է մոդուլի արժեքը: Գերեզմանի բոլոր երկրաչափական պարամետրերը արտահայտվում են իր մոդուլի միջոցով. 1. Ատամների մոդուլը մ=
=
.
2. Ատամի բարձրությունները h
=
2,25մ.
3. Ատամի գլխի բարձրությունը h=
մ.
4. Ատամի բարձրությունը h=
2,25մ.
5. Քառակուսի շրջանակի տրամագիծը դ
=
mz.
6. Circle- ի տրամագծերի տրամագիծը դ=
դ+
2
h =
դ+
2մ=
մ(z+
2). 7. Խոռոչի շրջանակի տրամագիծը
d = d + 2
h = d + 2
m = m (
z + 2):
8. Ճառագայթային մաքրություն հարթող օղակների միջեւ հետ=0,25t. 9. Կենտրոնի հեռավորությունը ա=
.
10. Ատամի սկիպիդար p= pմ.
Ատամի հաստությունը Ս=
0,5p=
.
12. Խորությունը լայնությամբ լ=
0,5p=
.
13. Պսակի շարժակների լայնությունը (ատամի երկարությունը) բ?
(6…8).մ 14. հանգույցի տրամագիծը դ?
(1,6…2)
դ.
15. հանգույցի երկարությունը լ=
1,5
դ.
16. Հռի հաստությունը դ
?
(2,5…4) մ.
17. պրոֆիլի անկյունը, ներգրավման տեսանկյունը բ =
բ
=
20. 18. Pitch տրամագիծը, սկզբնական տրամագիծը դ =
դ
=
mz.
19. Հիմնական տրամագիծը:
դ
=
դ cos b Նկար. 2 Փոխակերպման պարամետրեր Մեխանիզմում մեխանիկական հզորության մոդուլի որոշակի արժեքներ են ընդունվում արտադրության եւ շարժիչների փոխարինման համար, որոնք կազմում են տասնամյակներով թվեր կամ թվեր. 0.5; 0.7; 1; 1.25; 1.5; 1.75; 2; 2.5; 3; 3.5; 4; 4.5; 5 եւ այլն: B) ատամների երկայնական գիծ Առանցքակալները դասակարգվում են կախված `ատամների երկարության գծի ձեւի մեջ` խթանող հանդերձում, ուղղահայաց հանդերձում, շերվոն: Բ) Սփուր անիվները Spur անիվները `ամենատարածված շարժիչի տեսակը: Ատամները գտնվում են ճառագայթային ինքնաթիռներում, եւ երկու շարժակների ատամների շփման գծը զուգահեռ է ռոտացիայի առանցքի: Այս դեպքում երկու շարժակների առանցքները պետք է լինեն խիստ զուգահեռ: Spur անիվները ունեն ամենացածր գինը, բայց միեւնույն ժամանակ, նման անիվների սահմանափակումային պտտումը ցածր է պտտվող եւ ուղղահայաց շարժիչներից: C) ուղղահայաց հանդերձում Պտուտակային անիվները շարժիչի շարժակների բարելավված տարբերակն են: Նրանց ատամները անկյունագծված են ռոտացիայի առանցքից եւ ձեւավորվում են պարուրաձեւ մի ձեւով: Առավելությունները ` Նման անիվների ներգրավվածությունը ավելի հարթ է, քան սեղմող շարժակների եւ ավելի քիչ աղմուկով. Կոնտակտային տարածքը բարձրանում է սթրեսային հանդերձում, ուստի ավելի մեծ է նաեւ փոխանցման զույգը փոխանցվող սահմանափակող լարում: Ուղղահայաց հանդերձանքի շահագործման ընթացքում առաջանում է առանցքային երկայնքով մի մեխանիկական ուժ, որը պահանջում է լիսեռի տեղադրման համար տրվելի առանցքակալների օգտագործումը. Ատամի շփման տարածքը մեծացնելը (որը առաջացնում է ջեռուցման համար լրացուցիչ էներգիայի կորուստ), որը փոխհատուցվում է հատուկ քսայուղերի օգտագործմամբ: Ընդհանրապես, պտուտակավոր անիվները օգտագործվում են մեխանիզմների մեջ, որոնք պահանջում են բարձր պարամետրերի փոխանցում բարձր հաճախականության կամ աղմուկի վրա ծանր սահմանափակումներ ունեն: D) Chevron անիվները Այս անիվների ատամները պատրաստված են «V» տառատեսակով (կամ դրանք ձեռք են բերվել երկու ատաղձագործների միացման միջոցով, ատամների հակամոնտաժմամբ): Նման շարժակների վրա հիմնված շարժակազմերը սովորաբար կոչվում են «շիշ»: Chevron անիվները լուծում են առանցքային ուժի խնդիրը: Նման անիվի երկու հատվածի առանցքային ուժերը փոխադարձաբար փոխհատուցվում են, հետեւաբար, անհրաժեշտություն չկա տեղադրել բռնակներ առանցքների վրա: Այս դեպքում հանդերձը ինքնասոսնձվում է առանցքային ուղղությամբ, որի շնորհիվ քերվոն սկավառակների հետ փոխանցման տուփերում տեղադրվում են լողավազաններում (որպես կանոն, կարճ գլանաձեւ ժապավեններով կրողներ): D) Անիվների անիվները, ներքին հարդարանքով Չափսերի վրա խիստ սահմանափակումներով, մոլորակային մեխանիզմների մեջ, տիեզերական պոմպերի մեջ, ներքին հանդերձում, տանկի պտուտահաստոց վարելիս, օգտագործվում են ներսից կտրված անիվները, օգտագործվում են ներսից: Շարժիչի եւ շարժվող անիվների ռոտացիան կատարվում է մեկ ուղղությամբ: Նման փոխանցման մեջ կա ավելի քիչ շփման կորուստ, այսինքն ավելի բարձր արդյունավետություն: E) հատվածի հատվածներ Կառուցված անիվը ցանկացած տեսակի պայմանական անիվի մաս է: Այս անիվները օգտագործվում են այն դեպքերում, երբ հղումը ռոտացիան պարտադիր չէ ամբողջական շրջադարձի համար, եւ դրա համար կարող եք փրկել իր չափսերը: G) անիվները շրջանաձեւ ատամներով Ուղղահայաց ատամներով սկավառակների հիման վրա փոխանցումը նույնիսկ ավելի բարձր շարժիչ է, քան պտտվող շարժիչները, սոսնձման բարձր բեռնման հզորությունը, բարձր հարթությունը եւ անխափան շահագործումը: Այնուամենայնիվ, դրանք սահմանափակվում են կրճատման դիմումում, նույն պայմաններում, արդյունավետության եւ աշխատանքային ռեսուրսի դեպքում, այդպիսի անիվները արտադրության համար շատ ավելի բարդ են: Դրանց ատամնագիծը շառավղի շրջան է, որը ընտրված է կոնկրետ պահանջների համար: Ատամի կոնտակտային մակերեսները կատարվում են մի կետով, որը ներառում է միգրացիայի գծում, որը գտնվում է անիվների առանցքների զուգահեռ: 2. Հհանդերձում, դասակարգում Gear- ն մեխանիզմն է կամ մեխանիկական փոխանցման մեխանիզմի մի մասը, որը ներառում է հանդերձում անիվները: Gear դասակարգումը Ատամի պրոֆիլի ձեւը. Զբաղվել; Շրջանաձեւ (Novikov փոխանցում); Կիկլոիդալ: Ատամի տեսքով: Խթանել ատամները. Ուղղահայաց; Chevron; Curvilinear; Մագնիսական. Հանքերի առանցքների փոխադարձ համաձայնությամբ. Զուգահեռ axes (ուղիղ, oblique եւ chevron ատամներով գլանաձեւ շարժակների); Ուղղորդող անկյունները `բշտիկավոր շարժիչներ; Կողք կողքի: Նախնական մակերեսների ձեւը. Գլանաձեւ; Conical; Գլոբոիդ; Անիվ արագությամբ ` Դանդաղ շարժվում; Միջին արագություն; Speedboats. Անվտանգության աստիճանի համաձայն ` Բաց; Փակվել է: Ըստ անիվների հարաբերական ռոտացիան եւ ատամների տեղադրությունը. Ներքին հանդերձում (անիվների ռոտացիան մեկ ուղղությամբ); Արտաքին հանդերձում (անիվների ռոտացիան հակառակ ուղղությամբ): 3. Ներգրավել եւ դրա հատկությունները Տեխնիկայի մեջ օգտագործված շարժակների գերակշիռ մասը ունի ներգրավված պրոֆիլներով շարժիչներ: Ատամի պրոֆիլի ձեւավորման համար ներգրավված կորը առաջարկեց Լ. Էյուլերը: Դա նշանակալի առավելություն ունի այս նպատակով օգտագործվող այլ կորերի նկատմամբ, այն ապահովում է հանդերձանքի հիմնական օրենքը, ապահովում է հանդերձում հարաբերակցության կայունությունը, անբարենպաստ է առանցքային միջակայքում անհամապատասխանությունների համար (որը հեշտացնում է հավաքումը), արտադրության պարզագույնն ու տեխնոլոգիաները հեշտությամբ ստանդարտացված են (ինչը հատկապես կարեւոր է ընդհանուր շարժակների նման շարժակների): Ներգրավվածը ուղիղ գծի պատկերի հետագիծն է, որը գլանաձեւ է, առանց շրջանառության: Այս գիծը կոչվում է գեներացնող գիծ, եւ այն շրջանակը, որի վրա գլորում է, կոչվում է հիմնական շրջան (Նկար 3 ա): Նկար. 3 (ա, բ): Ներգրավվածն ունի հետեւյալ հատկությունները, որոնք օգտագործվում են ատամների տեսության մեջ. 1) ապագայի ձեւը որոշվում է հիմնական շրջանի շառավղով. 2) նորմալ է, որ ցանկացած կետում ներգրավված է շոշափում հիմնական շրջանը: Բազային շրջանակի հետ նորմալ շեղման կետը տվյալ կետում էվոլյուցիայի կիզակետի կենտրոնն է. 3) նույն հիմնական շրջանի առաջընթացը հավասարազոր է (միմյանցից equidistant) կորեր: Ներկառուցված ցանկացած կետի դիրքորոշումը կարող է միանշանակ բնութագրվել այն շրջանագծի տրամագծով, որի վրա տեղակայված է, ինչպես նաեւ ներկառուցվածքի բնութագրիչ անկյունները. Բացման անկյունը (նշանակված է ն), պրոֆիլի տեսանկյունը (բ), ներկառուցված անկյունը (Նկար 3 բ): Նկար 1b- ը ցույց է տալիս այս անկյունները Y- ի կամայականորեն ընտրված մի կետի համար, հետեւաբար ունեն համապատասխան ցուցանիշ: Ն Y - evolvent- ի անկյան զարգացում, B Y - Y կետի պրոֆիլի անկյունը; Inv Y- ն Y կետի մեջ ներգրավված անկյուն է (տրամագծի dY- ի շրջապատում): Այսինքն, ինդեքսը ցույց է տալիս, թե որ շրջանն է գտնվում քննարկվող զարգացած կետը, հետեւաբար բնորոշ շրջանակները օգտագործում են վերը նշված ցուցանիշները: Օրինակ, b ա 1-ը հարվածային պրոֆիլի անկյունն է, որը գտնվում է առաջին անիվի ուղղահայաց անկյուններում գտնվող կետում. ներկառուցված անկյունը անիվի սկավառակային շրջագծում տեղակայված զարգացած կետում եւ այլն: 4. Fromհանդերձում կտրելու գործողությունները Կան երկու հիմնական տարբեր կտրման մեթոդներ. 1) պատճենահանման եղանակը. 2) վարման մեթոդը: Առաջին դեպքում վարդագույն խոռոչը վերամշակված է համընդհանուր ֆրեզերային մեքենայով, որը ձեւավորված սկավառակի կամ մատների կտրող գործիքներով է, որի պրոֆիլը համապատասխանում է խոռոչի պրոֆիլին: Այնուհետեւ նախադրյալը վերածվում է 360 ° / z անկյան տակ եւ կտրեց հաջորդ ձորը: Այն օգտագործում է բաժանարար գլուխը եւ կան նաեւ գործիքներ տարբեր գործիքների եւ տարբեր ատամների հետ անիվների հատման համար: Մեթը ոչ արդյունավետ է եւ օգտագործվում է փոքր եւ անհատական արտադրության մեջ: Շարժակազմի կամ կլորացման երկրորդ մեթոդը կարող է կատարվել գործիքի երկաթուղային (սանր) օգնությամբ, որը տրված է հատվածի կտրված մեքենայի վրա: a dolbyak վրա հանդերձում ձեւավորող մեքենայի կամ worm Mill մի հանդերձում ֆրեզերային մեքենայի. Այս մեթոդը շատ արդյունավետ է եւ օգտագործվում է զանգվածային եւ լայնածավալ արտադրության մեջ: Նույն գործիքը կարող է կտրել անիվները տարբեր ատամներով: Դանակի երկաթուղու օգնությամբ կտրելը դնում է դարակ եւ պինիոնի հանդերձում, որտեղ ատամի պրոֆիլը ձեւավորվում է որպես գործիքի պրոֆիլի հաջորդական դիրքի ծրար, որի նախնական կոնտուրի անկյունը, որը b = 20 է: Կտրող գործիքի եւ անիվի կտրվածքի միջեւ ներգրավվածությունը կոչվում է հաստոց: Հաստոցների մեջ, նախնական շրջանակը միշտ համընկնում է սկիպիդար շրջանակի հետ: Հաշվի առնելով մեթոդների առավել արտադրողականությունը, մարմնի հենարանն է, որում օգտագործվում է worm mills- ի օգնությամբ: Երբ կտրում է մի տոքսիկի, նրա փոխադարձ շարժումը կատարվում է միաժամանակյա ռոտացիայի միջոցով: Փաստորեն, սա դիզայնի ներգրավվածությունն է գործիքի հանդերձում `ռամեր: Այս մեթոդը առավել հաճախ օգտագործվում է, երբ կտրում են ներքին հանդերձում: Բոլոր գնահատված մեթոդները օգտագործվում են գլանաձեւ անիվների հատման համար, այնպես էլ ուղիղ եւ ուղղահայաց ատամներով: 5. Կտրում ատամի պրոֆիլը:Gearing Correction Երբ կտրում են հատվածի անիվը, հնարավոր է կտրել ատամները, ինչը դրսեւորվում է ատամի սկավառակի հաստության նվազումով: Սա հանգեցնում է ատամների հիմնական (զարգացած) պրոֆիլը կտրելու եւ ճկունության ուժի նվազեցմանը: Ատամների կտրումը տեղի է ունենում, երբ N2- ի ներգրավված ակտիվ գիծը դուրս է գալիս B, B2- ի տեսական գծից, քանի որ այս գծից դուրս գտնվող ատամի պրոֆիլի ցանկացած կետը չի համապատասխանում հիմնական մեխանիզմների տրորեմին (նորմալ N "N" , որը վարվում է շփման կետի նման պրոֆիլում, չի անցնի ներգրավված բեւեռը): Խուզումի վտանգը ավելի քիչ անիվ է, քանի որ VuH2<В2Н. Որպեսզի որոշել նվազագույն տեղահանման գործակից xmin- ը եւ ատամների նվազագույն քանակը, որոնց համար ոչ հոսանքազրկվածություն չի նկատվում, կարելի է օգտագործել ատամների հիմնական կողմի պրոֆիլի սահմանային կետի L- ի կորիզի շառավիղը: Հիշեք, որ կետը, որը բաժանում է զարգացումը եւ կողմի պրոֆիլի անցումային մասը, կոչվում է սահման: Ինչպես հայտնի է, ներկառուցված ատամի հիմնական պրոֆիլը կառուցելիս օգտագործվում է զարգացող, որի ճառագայթումը, որը միշտ բավարարում է պայմանը p\u003e 0: Բացի այդ, ներգրավվածը դուրս է մնալու հիմնական շրջանակից եւ դրա ծագմամբ, որը համընկնում է հիմնական շրջանակի հետ կլինի p = 0 թեքության շառավղ: այն դեպքում, երբ անիվի ատամի պրոֆիլը կարող է լինել NN ներգրավված գծի վրա եւ ունենա p = 0 ճառագայթման շառավղով: Որոշ դեպքերում, մի փոքր ատամների վերացումն ընդունելի է, դա արվում է ատամների շփման պայմանները բարելավելու համար սկզբում (կամ վերջում) ) հանդերձանքով: Ուղեկցող շարժակների ուղղում (լատիներենից Corrigo- ճիշտ, բարելավում), ներգրավված ատամների ատամների ձեւի բարելավման մեթոդ: Երբ կտրում են մեխանիզմները, արտադրող երկաթուղու բնօրինակ ստանդարտ ուրվագիծը տեղափոխվում է ճառագայթային ուղղությամբ, որպեսզի նրա սկիպիդարային գիծը անիվի անիվի շրջանագծին չի դիպչում: Այս դեպքում, դուք կարող եք օգտագործել նորմալ դարակների եւ պինիոնային հանդերձում կտրելու գործիքը (սանր, worm ֆրեզերային դանակ եւ այլն) կամ dolbyaki: Մեքենայի գործիքի վարման մեթոդի վրա առաջացնում է կապար (տես `Gear կտրումը) ,
կտրելով անիվները, բնօրինակ կոնտուրի ցանկալի օֆսեթով: K. h. K. հայտնվել է որպես գործիքի անկատարության պատճառով մի շարք ատամների հետ անիվներում ատամի ցողունի անցանկալի կտրումը վերացնելու միջոց: Ժամանակակից K. h. քանի որ այն ունի ավելի ընդհանուր իմաստ եւ գործնականորեն արտահայտվում է բնօրինակ ուրվագիծը, որը հանդիսանում է դիդյակի անիվների հիմնական երկրաչափական պարամետրերից մեկը: Անիվի կենտրոնի փոխհատուցումը կարող է լինել բացասական կամ դրական: Ատամների պրոֆիլների դրական տեղաշարժի դեպքում օգտագործվում են մեծացող ժայռերի կորիզի տարածություններ, ինչը մեծացնում է ատամների շփման ուժը, ինչպես նաեւ մեծացնում է դրանց կոտրման ուժը: K. h. կարող են օգտագործվել բարելավել երկուսն էլ երկու անիվների հանդերձանքի որակը եւ անիվի հանդերձանքը երկաթուղով: Օպտիկայի համապատասխան ընտրությունը կարող է կրճատել ատամների սղությունը միմյանց նկատմամբ, կրճատել մաշվածությունը, նվազեցնել վտանգը եւ խթանել փոխանցման արդյունավետությունը: K. h. թույլ է տալիս փոխել կենտրոնի հեռավորությունը շարժակների մեջ, ինչը հնարավորություն է տալիս լուծել մի շարք կարեւոր կառուցվածքային խնդիրներ: Օրինակ, փոխանցման տուփերում, մոլորակային մեխանիզմների եւ այլն, կարող են տեղադրվել երկու փոխանցման հանքերի միջեւ, որտեղ նույն անիվը զբաղվում է տարբեր թվով ատամների վրա գտնվող անիվներով, կամ ոչ ստանդարտ շարժակազմերի վերանորոգման դեպքում կարող են փոխարինվել ստանդարտներով: Ուղղորդված հղումների երկրաչափությունը հաշվարկելիս օգտագործեք օֆսեթ գործոնը x, որը հավասար է բնօրինակ կոնտուրի տեղաշարժին, որը բաժանված է հանդերձում մոդուլի կողմից: Նշանակալից հետո x 1
1-ին եւ x 2
2-րդ անիվի համար անհրաժեշտ է դիտարկել սահմանափակող պայմանները. ատամի ոտնաթաթերի բացակայությունը կամ սահմանափակումը. ոչ մի միջամտություն, այսինքն ` անիվների համեմատաբար շարժման ժամանակ ատամի պրոֆիլների փոխադարձ խաչմերուկը. ձեռք բերելու բավարար ծավալի գործակից, որը հավաստիորեն ապահովում է հաջորդ զույգ ատամնաբույժի ներգրավումը մինչեւ ներգրավվածությունից առաջ անցնողը. ատամները կտրատելը, այսինքն ` վերին մասում ատամների բավարար հաստությունը ստանալու համար: ԽՍՀՄ-ն մշակել է այս պայմանները, այսպես կոչված, հաշվի առնելով հարմար եղանակը: արգելափակում են ուրվագծերը, որոնք կառուցված են կոորդինատներում x 1
եւ x 2
.
Այս գրաֆիկները արտացոլում են նշված սահմանափակումները եւ ձեւավորում են փակ հանգույց `x 1 եւ թույլատրելի կոմբինացիաների գոտու սահմանելով x 2
. Անիվների ատամների թվերի յուրաքանչյուր համակցության համար ( Զ 1
եւ Զ 2
) կառուցեք ձեր արգելափակման շրջանակը: Եթե փոխանցման հատուկ պահանջներ չկան, x 1
եւ x 2
թույլատրելի արժեքների գոտում դրանք ընտրվում են ըստ ընդհանուր առաջարկների, որոնք հաշվի են առնում հղումի բոլոր հատկությունները (այսպես կոչված, համընդհանուր համակարգեր K. z. K.) բարելավում: Եթե փոխանցման համար հատուկ պահանջներ կան (օրինակ `բարձր ատամների ուժը կոտրվածքների համար եւ այլն) x 1
եւ x 2
ընտրեք այս պահանջների առավելագույն բավարարվածության պայմանը (հատուկ համակարգեր K. z. k): Եզրակացություն Gears են առավել ռացիոնալ եւ ընդհանուր տեսակի մեխանիկական շարժակների. Դրանք օգտագործվում են էներգիայի փոխանցում `աննշան չափով մինչեւ տասնյակ հազարավոր կՎտ, շրջագծային ջերմաստիճանի փոխանցման համար, մինչեւ 10 ՄՀ-ի (1000 մկ) ֆրակցիաների փոխանցման համար: Շարժիչի հիմնական առավելություններն են` զգալիորեն ավելի փոքր չափերը, քան մյուս շարժումները: բարձր արդյունավետություն (կորուստներ ճշգրիտ, լավ լվացվող փոխանցումների 1-2%, հատկապես նպաստավոր պայմաններում `0.5%); բարձր ամրություն եւ հուսալիություն; սայթոցի բացակայություն; փոքր բեռների վրա հանքերի վրա: Դարերի թերությունները ներառում են աղմուկի աշխատանքի եւ ճշգրիտ արտադրության անհրաժեշտությունը: Ամենապարզ փոխանցումատուփը բաղկացած է երկու անիվներով ատամներով, որոնց միջոցով նրանք միմյանց հետ կապում են: Ուղղորդված շարժիչի պտտումը վերափոխվում է շարժվող անիվի ռոտացիայի միջոցով, սեղմելով երկրորդի ատամների առաջին ատամները: Փոքր հեծանիվը հանդերձում է, իսկ ավելի մեծ է անիվը: Հղումներ 1. Իվանով Մ.Ն. Մեքենայի մասեր `բարձրագույն ուսանողների համար դասագիրք: տեխ. ուսումնասիրություններ: հաստատությունները: Մ. Sc., 1991. - 383 էջ. 2. Գուզենկով Պ.Գ. Մեքենայի մասեր: - Մ., Բարձրագույն դպրոց, 1982 թ. - 504 էջ. 3. Կուկլին Ն.Գ., Կուկլինա Գ.Ս., մեքենաների մասեր: - Մ., Բարձրագույն դպրոց, 1984 թ. - 310 թ. 4. Գ.Ի. Ռոշչին, Է.Ա. Սամոիլով, Ն. Ալեքսեեւա. Մեքենայի մասեր եւ դիզայնի հիմունքներ. Ուսումնասիրություններ: համալսարանների համար / ed. Գ. Ռոշչին եւ Է.Ա. Սամոիլովը: - Մ., Դրոֆա, 2006. -415 էջ. Տեղադրվել է Allbest.ru- ում Օդորակիչների դասակարգումը գործառնական նպատակներով: Tolerance համակարգը խթանող շարժակների համար: Մեքենաների եւ շարժակների վերահսկման մեթոդներ եւ միջոցներ: Սրիչի շարժակների վերահսկման սարքեր, դրանց կիրառման կիրառման մեթոդներ: վերացական, ավելացվել է 11/26/2009 Տրակտորների մեխանիզմները, որոնց միջեւ կապը փոխանցվում է ատամների հաջորդական ներգրավմամբ: Շարժակազմերի դասակարգումը: Հաղորդման տարրերի տեսության տարրեր: Ընդգրկված խթանիչ շարժակների երկրաչափական հաշվարկը: Շարժիչի ձեւավորումները: ներկայացումը ավելացվել է 02/24/2014 թ .: Տրանսպորտային միջոցների տեսակները: Գլանաձեւ շարժակների արտաքին դրսեւորման պարամետրերը: Ատամի քայքայման տեսակները: Չափերի հաշվարկման չափանիշներ: Նրբատախտակային նյութերի ընտրություն եւ ջերմային բուժման մեթոդներ: Թույլատրելի սթրեսը գագաթնակետային բեռի մեջ: դասախոսությունների դասընթաց, ավելացվել է 04/15/2011 Ցանցային ուղղահայաց շարժիչի շարժիչների պարամետրերը: Շարժիչի նմուշները եւ նյութերը, դրանց չափը եւ ձեւը: Bevel շարժակների եւ նրա երկրաչափական հաշվարկը: Անտառի շարժակների ձեւավորումն ու հաշվարկը: Ճարպի շարժակների հիմնական առավելություններն ու թերությունները: վերացական, ավելացվել է 01/18/2009 Նյութերի արտադրության նյութեր, դրանց նախագծում եւ տեխնոլոգիական առանձնահատկություններ: Անոթների քիմիական ջերմային բուժման էությունը: Մեքենաներ արտադրող սխալ: Վերամշակման տեխնոլոգիական երթուղով ցեմենտ շարժիչներ: վերացական, ավելացրեց 01/17/2012 Գլանաձեւ գլանաձեւ անիվների հանդերձում ֆրեզերային հաստոցների գործարկման սկզբունքը, ճիրանի ֆրեզերային դանակով: Ատամի կտրող մեթոդները եւ հիմնական մեթոդները: Կտրող շարժակների կտրման գործիք: Սեղմող սարքեր, փոխանցումատուփեր եւ դրանց հիմնական տեխնիկական բնութագրեր: երկարաժամկետ թղթի վրա, ավելացրել է 01/14/2011 Ատամների շարժակների պահանջները: Բլանկների ջերմային բուժում: Ցեմենտի մասերի որակի հսկողություն: Ջերմային բուժման ընթացքում շարժակների դեֆորմացիա: Վերահսկողության մեխանիզմներ եւ միջոցներ: Ցեմենտ կպչուն վառարան: րդ հոդվածի 1-ին կետը Ատամի պրոֆիլների ձեւի շարժակների դասավորությունը, դրանց տեսակը, հանքերի առանցքների հարաբերական դիրքը: Դարների հիմնական տարրերը: Ցիլինդրոմի հիմնական երկրաչափական պարամետրերի հաշվարկը: Անիվի ատամների գագաթների տրամագծի չափում: ներկայացումը ավելացվել է 05/20/2015 թ .: Առագաստների վերամշակման մեթոդների տեխնոլոգիական հնարավորությունների ընդլայնում: Բլեյտային գործիքի մշակման մեթոդներ: Մեքենաների առավելությունները `պարամետրերի ճշգրտությունը, ատամների աշխատանքային մակերեսների որակը եւ շարժակների նյութի մեխանիկական հատկությունները: րդ հոդվածով Շինարարություն, հագուստ, վերանորոգում եւ փոխարինում շարժակների: Արագության վերանորոգման շարժակների մեթոդներ: Գլանաձեւ, պտուտակավոր, պտտվող հանդերձ: Բաց եւ փակ վահանակներ, փոխանցումատուփի հանդերձում քսայուղ: Փոխարինման միջոցով բարձր արագությամբ վերանորոգման մեթոդները: Gear գնացք մի մեխանիզմ, որը բաղկացած է ատամների հետ անիվների միջով, որոնք միմյանց հետ զուգորդվում են եւ փոխանցում պտտվող շարժում, սովորաբար ձեւափոխում անկյունային արագություններ եւ թորիկներ: Z. p- ը, որը բաժանված է փոխանցման վրա առանցքների փոխադարձ համադրմամբ ( բրինձ 1
): զուգահեռ axes - գլանաձեւ; խցանման առանցքներով - կոնաձեւ, ինչպես նաեւ հազվադեպ օգտագործվող գլանաձեւ կոնաձեւ եւ ինքնաթիռի գլանաձեւ; կողք-կողքի եզրեր `ատամնավորված պտուտակով (ճիճու, հիպոիդ եւ պտուտակ): Աստղային ափսեի առանձնահատկությունն այն է, որ պտտվում է պտտվող շարժումը թարգմանական կամ հակառակը: Մեքենաների եւ մեխանիզմների մեծ մասում Z. p. Արտաքին հանդերձում, այսինքն `արտաքին մակերեւույթի վրա ատամները, ավելի պակաս հաճախակի ներքին հանդերձում, որոնցում օգտագործվում են ատամները կտրվածքի վրա, մեկ անիվի վրա: Առջեւի անիվները իրականացնում են `անմիջական ատամները` բաց փոխադրումների ցածր եւ միջին արագության եւ արագության տուփերում աշխատելու համար; միջուկի ատամները `միջին եւ բարձր արագությամբ խցանման շարժիչների համար (30% -ից ավելի բոլոր շարժիչային շարժակների); ծանր մեքենաներում բարձր պահերի եւ ուժերի փոխանցման համար քերվոն ատամներով. շրջանաձեւ ատամներով, բոլոր կրիտիկական կոնաձեւ շարժակների մեջ: Որպես կանոն, մեխանիզմներում եւ մեխանիզմներում օգտագործվում են մշտական հանդերձում հարաբերակցությունը: Gear հարաբերակցությունը) որտեղ w 1 , z 1 եւ w 2 , z 2 - անկյունային արագություն եւ ատամների քանակը, համապատասխանաբար, բարձր արագությամբ եւ ցածր արագությամբ շարժակների: Լողացող փոխանցման տուփը փոփոխական հանդերձում է, կատարվում է ոչ շրջանաձեւ գլանաձեւ անիվներ, որոնք տրվում են ստրուկ տարրին սահուն տարբեր արագությամբ վարպետի անընդհատ արագությամբ: Նման Z. p. Հազվադեպ է օգտագործվում: Փոխանցման տուփի մեջ գտնվող մեկ զույգ անիվի փոխանցման հարաբերակցությունը սովորաբար մինչեւ 7 է, փոխանցման տուփերում `մինչեւ 4, մեքենաների սեղանների սկավառակների մեջ մինչեւ 20 եւ ավելի: Բարձր արագությամբ բարձր ճնշման արագություն Z. n - մինչեւ 15 մ / վ պտուտակավոր շարժակների համար, մինչեւ 30 տարեկան մ / վ բարձր արագությամբ շարժակների արագությունը մինչեւ 100 մ / վ եւ ավելին: Z. ս.-ն մեխանիկական փոխանցման ամենաթանկ եւ տարածված տեսակն է: Դրանք օգտագործվում են իշխանությունը փոխանցելու համար `աննշան եւ տասնյակ հազարավոր kW, թաղային ուժերը մի գրամից մինչեւ 10 աստիճան փոխանցել Մն (1000 մկ).
Z. P- ի հիմնական առավելություններն են `զգալիորեն փոքր չափերը, քան մյուս շարժումները: բարձր արդյունավետություն (կորուստներ ճշգրիտ, լավ լվացվող փոխանցումների 1-2%, հատկապես նպաստավոր պայմաններում `0.5%); բարձր ամրություն եւ հուսալիություն; սայթոցի բացակայություն; փոքր բեռների վրա հանքերի վրա: Աշխատավարձի պայմանների թերությունները ներառում են աղմուկի աշխատանքի եւ հստակ արտադրության անհրաժեշտությունը: Gears են այսպես կոչված. ատամնաբույժը, որի հիմնական կինեմատիկական առանձնահատկությունը ատամների անընդհատ շփման հետ կապված ակնթարթային հանդերձանքի կայունության կայունությունն է: Այս պարագայում բոլոր շղթաների ցանկացած կետում հագեցված անիվների պրոֆիլների ընդհանուր նորմալ (ներգրավված գիծ) պետք է անցնի ներգրավվածության բեւեռից ( բրինձ 2
): Գլանաձեւ շարժակների մեջ ներգրավված բեւեռը շղթայի կետն է, որը գործում է դիդյակի անիվների նախնական շրջանակների միջեւ, այսինքն, շրջանակները, որոնք միմյանց գլորել են առանց սահելու: Նախնական շրջանակների տրամագիծը դ 1 եւ դ 2 կարելի է որոշել հարաբերակցությունները.
որտեղ A - կենտրոնի հեռավորությունը (անիվի առանցքների միջեւ հեռավորությունը): Այս վիճակը բավարարված է բազմաթիվ կորերներով, մասնավորապես, զարգացող երկրներում, որոնք առավել շահավետ են ատամնաբուծության համար, գործառնական եւ տեխնոլոգիական հատկությունների համադրությամբ: Զբաղեցրեք հանդերձանքը ստացել առաջնային օգտագործումը մեքենաշինության ոլորտում: Անիվների հետ ներգրավված անիվները կարելի է կտրել մի գործիքով, անկախ ատամների քանակից եւ այնպես, որ յուրաքանչյուր ներկապնակի անիվը կարող է զբաղվել ատամների ցանկացած քանակությամբ անիվներով: Գործի ատամները կարող են լինել պարզ, հարմար արտադրության եւ վերահսկողության համար: Ներգրավված ներգրավվածությունը փոքր զգայուն է կենտրոնի հեռավորության շեղումների նկատմամբ: Ատամների պրոֆիլների շփումը տեղի է ունենում ներգրավման գծի կետերում, որը անցնում է ներգրավված բեւեռից, տրամագծով հիմնական շրջանակների հետ դ 01 = դ 1 cos α եւ դ 02 = դ 1 cos α, որտեղ α է ներգրավվածության անկյունը: Ներգրավված եւ այլ դաշնակիցների հիմնական մոդուլային պարամետր - մոդուլ մ, հավասար է հանդերձանքի սկիպիդարային տրամագծի հարաբերակցությանը դ դ ատամների քանակը z. Չհաշվված չարաշահող շարժակների համար (տես Անիվի ուղղահայաց ուղղումա) սկզբնապատճառի եւ սկիպիդար շրջանակները համընկնում են. դ 1 = դ d1 = mz 1 եւ դ 2 = d d2 = mz 2 . Անձնագիր այսպես կոչված: գեներացնող դարակը, որը ստեղծում է հանդերձում, ներկայացվում է հիմնական երկաթուղու բնօրինակ կոնտուրի երկայնքով ( բրինձ 3
), որը ձեռք է բերվում անսահմանության նորմալ ճնշող հանդերձում ատամների քանակի ավելացման միջոցով: Reiki արտադրող ատամները բարձրացել են բարձրությունը h = (h ' + h '')
ստեղծել ցանցում ճառագայթային մաքրություն ( c o m),
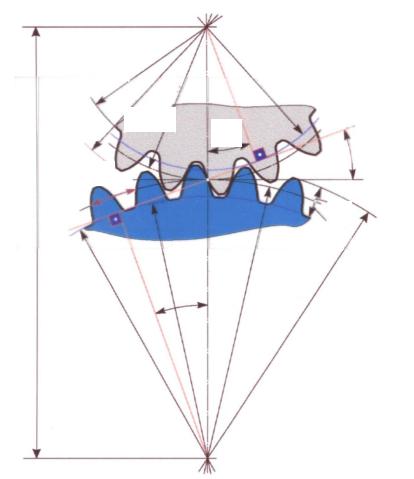
հաստությունը երկայնքով քառակուսի շրջանով ի, ճառագայթման շեղջ r i,հանդերձանքով t, gearing անկյունը α d. Սխալ շարժակների մեջ նախնական ուրվագիծն ընդունվում է ատամի գիծում նորմալ բաժնում: Conic Z. պ. ( բրինձ 4
) նախնական բալոնները փոխարինվում են նախնական փայլերով 1
եւ 2
. Ատամների պրոֆիլները մոտավորապես համարվում են ատամների կողմնակի մակերեւույթների խաչմերուկներ, լրացուցիչ խցերով: 3
եւ 4,
coaxial նախնական, բայց գեներատորների հետ, ուղղահայաց նախնական cones գեներատորների համար: Մոդուլը, նախնական եւ քառակուսի շրջանակները չափվում են արտաքին լրացուցիչ կոն: Ատամի պրոֆիլավորման հարմարության համար լրացուցիչ խարիսխները տեղակայված են ինքնաթիռի վրա: 5
եւ 6.
Ներգրավված ներգրավվածությունը կարող է բարելավվել ուղղելու միջոցով: Բացի ներգրավված հանդերձանքից, ժամացույցի մեխանիզմները եւ որոշ այլ սարքեր օգտագործում են ցիկլոիդային հանդերձում, որը աշխատում է ավելի քիչ շփման կորուստների հետ եւ հնարավորություն է տալիս օգտագործել ատամնաշարերի անիվները մի փոքր քանակությամբ ատամներով, բայց որոնք չեն ունենում ներգրավված հանդերձանքի որոշակի առավելություններ: Ծանր մեքենաներում, ներգրավված շարժակների հետ միասին, օգտագործվում են շրջանաձեւ անիվի շարժիչներ ( բրինձ 5
), առաջարկվում է 50-ական թվականներին: 20-ը: Մ. Նովիկով: Նովիկովի ներգրավվածության մեջ գտնվող անիվների ատամների պրոֆիլները նկարագրված են շրջանակների կղզիներով: Մի հանդերձանքով (սովորաբար փոքր) դառնում են շփումը մյուսի խոռոչի ատամներով: Նախնական շփումը (առանց բեռի) տեղի է ունենում մի կետում: Նավիկովի փոխանցման անիվների փոխանցման մեջ ուղղահայաց: Ատամի շփման կետերը չեն շարժվում ատամների բարձրության վրա, այլ միայն առանցքային ուղղությամբ, այսինքն, ներգրավվածության գիծը զուգահեռ է անիվների առանցքներից: Նման սառեցման համակարգերի առավելությունները ներառում են `կրճատված կոնտակտային սթրեսներ, նավթի քերի ձեւավորման բարենպաստ պայմաններ, անիվների փոքր քանակությամբ ատամների օգտագործման հնարավորություն, եւ, հետեւաբար, մեծ տրանսպորտային միջոցների հարաբերակցություններ: Նովիկովի շարժակների կրող հզորությունը շփման ուժի չափանիշով զգալիորեն ավելի բարձր է, քան ներգրավվածները: Արտադրանքի բավարար աշխատանքի համար անհրաժեշտ է դրանց ճշգրտությունը: Հ.Պ.- ն ապահովել է 12 աստիճանի ճշգրտությամբ, ընտրվելով փոխանցման աշխատանքի նպատակի եւ պայմանների հիման վրա: Ախտորոշման հիմնական պատճառներն են `ատամների կոտրումը, ատամների մակերեսային շերտերի հոգնածության ճնշումը, ատամների կրճատումը, ատամների խառնումը (նկատվում է, երբ նավթի ֆիլմը ոչնչացվում է բարձր ճնշումներից կամ բարձր ջերմաստիճանից): Ցանցերի հիմնական նյութերը օժտված են ջերմային կամ քիմիական-ջերմային բուժման ենթարկված խառնուրդներ. Մակերեսային կարծրացում, հիմնականում բարձր հաճախականությունների հոսանք, խտության ամրացում, ցեմենտացիա, նիտրո-ցեմենտացիա, նիտրացիա, ցիանացում: Z. պ., Պողպատե, բարելավվել է ջերմային բուժումից առաջ ատամները կտրելը, արտադրված նրանց չափերի համար խիստ պահանջների բացակայության դեպքում, առավել հաճախ `փոքր եւ անհատական արտադրության մեջ: Անխափանության եւ ցածր բեռների հատուկ պահանջներով, շարժիչներից մեկը պատրաստված է պլաստմասսայից (PCB, caprolon, լամինացված պլաստմասսա, polyformaldehyde) եւ զուգավորումն արտադրվում է պողպատից: Հ.Գ. Հաշվարկեք ատամների հիմքում վտանգավոր հատվածում կախված սթրեսների ուժի եւ շղթայի ճառագայթների վրա ազդարարումը: Պահեստամասերը օգտագործվում են պարզ միակողմանի շարժակների ձեւով եւ մի քանի շարժակների տարբեր զուգորդումների ձեւով, ներկառուցված մեքենաներով կամ առանձին միավորներով: Z. pp- ը լայնորեն կիրառվում է անկյունային արագությունների անկման եւ մեծացնելու համար տորթը Հաղորդման տուփ Ահմ Փոխանցումատուփերը սովորաբար կատարվում են համապատասխանաբար մեկ, երկու եւ երեք փուլերի հանդերձանքների համապատասխանաբար, 1.6-6.3; 8-40; 45-200: Ամենատարածված երկու փուլային փոխանցման տուփեր (մոտ 95%): Շարժիչի շարժիչի անընդհատ արագությամբ ելքային լարման ռոտացիայի տարբեր հաճախականությունների ձեռքբերման համար օգտագործվում են փոխանցման տուփեր (տես Փոխանցումատուփ): Գերեզման մեխանիզմների հնարավորությունները ընդլայնվում են մոլորակային շարժակների կիրառմամբ (Տես Մոլորակային հանդերձում),
որոնք օգտագործվում են որպես փոխանցման տուփեր եւ դիֆերենցիալ մեխանիզմներ (տես Դիֆերենցիալ մեխանիզմ): Մոլորակային աստղերի շարժիչների փոքր չափերը եւ զանգվածը որոշվում են բեռնվածքի բաշխման միջոցով մի քանի անվադողերի (արբանյակների) միջեւ, որոնք կատարում են մոլորակային շարժումը եւ ներքին զորավարժությունների կիրառումը, որն ունի աճող կրող հզորություն: Պարզ հանդերձանքից դեպի մոլորակին անցնելիս հասնում է 1,5-5 անգամ զանգվածի կրճատմանը: Ամենափոքր հարաբերական չափերը ունեն ալիքի փոխանցումներ (Տես Ալիք փոխանցում),
ապահովելով խոշոր բեռների փոխանցումը բարձր կինեմատիկ ճշգրտությամբ եւ կոշտությամբ: Կարդացեք. Կուդրուավցեւ Վ.Ն., Շարժումներ, Մ.-Լ., 1957; Ռեզետով, Ն. Ն., Մեքենաների մասեր, Մ., 1963; Չասովնիկով, LD, Transfings by meshing, M., 1969; Մեքենայի մասեր: Ձեռնարկ, հրատարակություն: Ն.Ս. Աչերկանա, մաս 3, Մ., 1969: Դ. Ն. Ռեշետով. Նկար. 2. Ներգրավված պրոֆիլների ձեւավորում. NN - ընդհանուր նորմալ; P - շարժիչ բեւեռ; α է ներգրավվածության անկյունը. ω 1 եւ ω 2 - անկյունային արագություններ; 1 եւ 2 - հանդերձում անիվները: Մեծ Սովետական հանրագիտարան: - Մ.: Խորհրդային հանրագիտարան.
1969-1978
.
Gear գնացք - Gears: Gears: շարժիչ անիվներ; օգտագործված ուղղահայաց հանդերձում; Չեւրոնում; գ կոնյակային: Արագության փոխանցում, հողմային պտտվող շարժման փոխանցման մեխանիզմ եւ ռոտացիոն արագության փոփոխություն: Gears կարելի է կառուցել մեքենայի մեջ, ... Illustrated հանրագիտարանային բառարան Փոխանցում, օգտագործելով հանդերձում: Ռոտացիայի փոխանցման հնագույն եղանակներից մեկը, որը լայնորեն կիրառվում է այսօր, հատկապես այն դեպքերում, երբ պահանջվում են պտտվող հաճախականությունների մշտական հարաբերությունները: Gears ... ... Collier- ի հանրագիտարանը հանդերձում գնացք - փոխանցման եռակցման մեխանիզմ, որտեղ երկու շարժվող հատվածներն են դարբնոցային անիվները, որոնք ֆիքսված կապով պտտվող կամ թարգմանական զույգ են կազմում: [ԳՕՍՏ 16530 83] Փոխանցման առարկաներ Ընդհանուր դրույթներ Պայմաններ կապված ... ... Տեխնիկական թարգմանչի ուղեցույց Երեք ուղիղ մեխանիզմ, որտեղ 2 շարժական կապեր են շարժիչային անիվները (կամ անիվը եւ դարակը, ճիճուրը), որոնք ֆիքսված կապի (մարմին, դարակ) պտտվող կամ թարգմանական զույգ են կազմում: Կան գլանաձեւ շարժիչներ ... Մեծ հանրագիտարանային բառարան Արագության փոխանցում - երեք փուլային մեխանիզմ, որտեղ երկու բջջային կապը շարժիչի անիվները (կամ անիվը եւ դարակը, ճիճուրը), որոնք կազմում են պտտվող կամ թարգմանական զույգ, ֆիքսված կապով (մարմին, դարակ): Գոյություն ունեն գլանաձեւ բալոններ, ... Մեծ պոլիտեխնիկական հանրագիտարան Spur gear A spur gear- ը մեխանիզմ է կամ մեխանիկական հանդերձումի մեխանիզմի մի մասը, որը ներառում է հանդերձում անիվները: Նպատակը. Պտտման շարժի փոխանցումը հանքերի միջեւ, որը կարող է ունենալ զուգահեռ Հորատանցքերի միջեւ պտտվող շարժման փոխանցման մեխանիզմը եւ պտտման արագությունը փոխելու համար, որը բաղկացած է անվադողերի անիվներից (կամ տրված անիվից կամ դարակից), կամ ճիճու եւ ճիճու անիվ: Ամենապարզ միակողմանի հանդերձանքի դարակների հղումները ... Հանրագիտարանային բառարան Պտտման փոխանցման մեխանիզմը: շարժումը շարժիչների միջեւ եւ ռոտացիոն արագության փոփոխություն, որը բաղկացած է շարժակների (կամ տրված անիվի կամ սլատների), կամ ճիճու եւ ճիճու անիվի միջեւ: Ամենադյուրին մեկ փուլով `3 հատ, բաղկացած դարակից, առաջատարներից եւ ... ... Մեծ հանրագիտարանային պոլիտեխնիկական բառարան հանդերձում գնացք - Քրոմապատի կարգավիճակների համար անհրաժեշտ է ավտոմատ անջատել: angl. հանդերձում գնացք; փոխանցման փոխանցում; gearing vok. Zahnradübersetzung, f; Zahnradgetriebe, n; Zahnradtrieb, m rus. փոխանցման գնացք, f pranc. commande par engrenages, f ryšiai: ... ... Automatikos terminų žodynas հանդերձում գնացք - հանդերձում: հանդերձում: հանդերձանքը: հանդերձանքով: հանդերձում զույգը: որդին: անթափանցիկ հանդերձանքով: hypoid փոխանցումը: գլոբոյ փոխանցում: մոլորակային հանդերձում: ուղղահայաց հանդերձ (# gear): chevron (# անիվ): gear կտրող մեքենա (# մեքենա): հանդերձում ձեւավորելը ... ... Ռուսաց լեզվի գաղափարախոսական բառարան

![]()
Ուղարկել ձեր լավ աշխատանքը գիտելիքների բազայում պարզ է: Օգտագործեք ստորեւ բերված ձեւը:
Նմանատիպ փաստաթղթեր
![]()

Տեսեք, թե ինչ է «հանդերձանքը» այլ բառարաններում: