원통형 웜 기어의 모듈 계산. 웜 기어
운영 및 범위의 원칙. 웜 기어 (그림 11.19)는 맞물림 축이있는 기어를 나타냅니다. 교차 각도는 대개 90 °입니다. 웜 기어의 이동은 나사 쌍의 원리 또는 경사면의 원리에 따라 변환됩니다. 웜 기어는 웜 (그림 11.20)이라고하는 나사와 웜 휠 (그림 11.22)이라고하는 기어로 구성됩니다. 웜이 축을 중심으로 회전하면 회전이 원통형 표면을 따라 움직이며 웜휠이 회전합니다. 웜 및 웜휠은 전체 블랭크의 특수 공구로 치아를 절단하여 만듭니다. 기어와 동일한 웜 기어에는 분할 실린더의 직경이 있습니다 (그림 11.19). d 1 - 웜의 직경을 나눈 값, d 2 - 웜휠의 피치 직경. 피치 직경의 접선 점을 교전 극이라고합니다.
그림 11.19 - 웜기어의 구조.
웜 기어의 장점 :
1. 1 단에서 큰 기어비를 얻을 수있는 가능성 (나는= 8 – 200).
2. 부드럽고 조용한 작동.
3. 소형 (작은 크기).
4. 제동 (웜 휠에서 웜으로 토크를 전달할 수 없음).
5. 댐핑 특성은 기계 진동을 감소시킵니다.
웜 기어의 단점 :
1. 약혼 영역에서 상당한 마찰.
2. 열전달.
3. 낮은 효율.
웜 기어는 제한된 전력 (일반적으로 최대 50kW)이있는 장치에 사용됩니다.
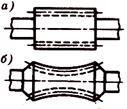
그림 11.20 - 웜.
웜기어는 기어 커팅 머신, 세로 밀링 머신, 심공 드릴링 머신, 리프팅 및 트랙션 윈치, 호이스트,로드 리프트 메커니즘, 붐 및 터닝 자동차 및 철도 크레인, 굴삭기, 엘리베이터, 트롤리 버스 및 기타 기계를 분리 및 공급하는 메커니즘에 사용됩니다.
웜. 실이 절단되는 표면의 모양에 따라 원통형 (그림 11.20, a)과 글로 프로이드 형 (그림 11.20, b) 웜이 있습니다. 나사 프로파일의 모양은 축 방향 단면의 프로파일을 가진 직선형 (그림 11.21, a)과 곡선 형 (그림 11.21, b)입니다. 더 일반적으로 사용되는 원통형 웜. 끝 단면의 축 방향 단면에 직선 프로파일이있는 웜에서 코일은 아르키메데스 나선형으로 윤곽이 그려 지므로 아르키메데스는 사다리꼴 나사와 유사한 웜이라고합니다.
인벌 루션 웜은 엔드 섹션에서 인벌 류트 프로파일을 가지므로 치아의 수가 웜의 방문 횟수와 같은 나선형 인벌 류트 휠과 유사합니다. 웜의 주요 기하학적 매개 변수는 다음과 같습니다. = 20 °는 프로파일 각도입니다 (아르키메데스 웜의 경우 축 방향 단면에서, 인벌 류트 웜을 절단 한 경우 정상적인 단면에서). p - 웜 및 휠의 피치 원의 피치는 웜 및 휠의 피치 원에 대응하고; t =축 모듈; z 1. -웜의 방문 횟수; - 웜의 직경 계수. - 나선의 앙각 ![]() ; d 1 =qm -피치 직경 (이하 그림 11.21 참조); d1 = d1 + 2m- 투영의 직경; dfl = d1 - 2,4m - 구멍의 원의 직경; b 1 - 웜의 절단 부분의 길이는 휠의 가장 많은 잇수의 동시 기어링을 사용하는 조건에 따라 결정됩니다 [ z 1 = 1 ... 2b1\u003e (11 + 0.06z2) m ~에서 z 1 = 4 b 1 ≥(12.5 + 0.09z2) m].
; d 1 =qm -피치 직경 (이하 그림 11.21 참조); d1 = d1 + 2m- 투영의 직경; dfl = d1 - 2,4m - 구멍의 원의 직경; b 1 - 웜의 절단 부분의 길이는 휠의 가장 많은 잇수의 동시 기어링을 사용하는 조건에 따라 결정됩니다 [ z 1 = 1 ... 2b1\u003e (11 + 0.06z2) m ~에서 z 1 = 4 b 1 ≥(12.5 + 0.09z2) m].

그림 11.21 - 웜의 스레드 프로파일 모양과 주요 기하학적 매개 변수
의미 m 및 q 표준화.
웜휠. 오프셋없이 절단 할 때 (그림 11.22) :
d 2= z 2 m - 주 섹션에서 피치 원의 지름;
d2 = d2 + 2m - 주 섹션에서 돌출부의 직경;
d f 2 = d2 - 2,4m - 주요 섹션의 구멍의 원의 직경;
아= 0.5 (q + z2) m- 중심 거리.
표 11.3 크기 b 2 -웜 휠 너비 및 d aM 2 - 동력 전달의 경우 휠 (2δ) = 100 °에 의한 웜 원주의 각도에 해당하는 최대 휠 직경 :
표 11.3
참고비 절단 조건에서 휠의 잇수가 허용됩니다.
제조의 정확성. 웜 기어의 경우 표준이 12 도의 정확도를 제공합니다. 높은기구 학적 정확도가 필요한 기어의 경우 III, IV, V 및 VI 정도의 정확도를 권장합니다. 동력 전달 장치의 경우 V, VI, VII, VIII 및 IX 정도의 정확도를 권장합니다.
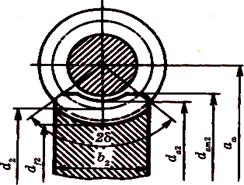
그림 11.22 - 웜휠의 주요 기하학적 파라미터
기어비 웜기어에서는 기어와 달리 주변 속도 v 1및 v 2일치하지 않는다 (그림 11.23 참조). 그들은 90 °의 각을 향하고 있으며 크기가 다르며, 상대 운동 분열 실린더는 원통형 기어 및 베벨 기어와 같이 움직이지 않으며 슬라이드합니다. 웜이 한 바퀴 돌아 가면 바퀴의 잇수가 웜 히트 수와 같은 각도로 회전합니다. 휠은 웜의 속도로 전체 회전합니다.
그래서 z 11, 2 또는 4 (기어에있을 수 없음)와 같을 수 있습니다. 그런 다음 하나의 웜 쌍에서 큰 기어 비율을 얻을 수 있습니다.
기어링에서 미끄러짐. 움직일 때 웜의 회전은 나사 쌍처럼 휠의 톱니를 따라 미끄러집니다. 슬라이딩 속도 v s웜의 나사선에 접하게됩니다. 상대 속도는 웜과 바퀴의 절대 속도 인 주속 인 기하학적 차이와 같습니다 v l및 v 2(그림 11.19와 그림 11.23 참조). 또는, while
![]()
![]()

도 4 11.23. 슬라이딩 속도 결정 방식
웜 나선의 앙각입니다. 그래서< 30°, то в червячной передаче v 2적은 v 1~ v smore 웜 기어의 큰 미끌림은 효율 저하, 마모 증가 및 압류 경향을 유발합니다.
웜기어 효율 (11.48)에 의해 결정된다. 차이점은 메쉬의 손실 정의에 있습니다. 스크류 페어 KP.D.와 유사합니다. 주요 웜과의 기어 결합은 공식에 의해 결정됩니다.
효율성은 웜의 방문 횟수가 증가하고 (증가) 마찰 계수 또는 마찰각이 감소함에 따라 증가합니다. f. 바퀴가 인도되고 있다면, 힘의 방향이 바뀌고 우리는
≤, 3 = 0 일 때 반대 방향 (바퀴에서 웜까지)으로의 이동은 불가능합니다. 우리는자가 제동 웜 쌍을 얻습니다.
마찰 계수는 미끄럼 속도에 따라 달라지는 것이 실험적으로 입증되었습니다. 증가와 함께 v s아래로. 이것은 사실 v s반 유체 마찰에서 액체 마찰로 전환됩니다. 마찰 계수의 값은 또한 마찰면의 거칠기와 윤활유의 품질에 따라 달라집니다.
예비 계산의 경우, v s알 수없는 경우 표 11.4의 평균 값으로 효율성을 선택할 수 있습니다.
표 11.4
전송 효율의 크기를 결정한 후 계산을 명확히합니다.
기어링을 강요합니다. 웜 기어링 (그림 11.24 참조) : 웜의 원주 방향 힘 F 1웜의 축 방향 힘과 동등하다. F a 2,
바퀴 둘레 F ~ 2는 웜의 축 방향 힘과 같습니다. F a 1
반경 방향 힘
(11.71)
정상 강도
![]() (11.72)
(11.72)
힘의 축 방향면 F tz및 F r성분이다. Fn = Fncos(축 방향 평면 상에 수직 힘의 투영). T 1 -웜에 대한 순간, T 2- 바퀴의 순간 :
T 2 = T(11.73)
기본 성능 및 계산 기준. 웜 기어는 굽힘 응력 및 접촉 응력으로부터 계산됩니다. 더 많은 마모와 잼이 있습니다. 이는 높은 슬라이딩 속도와 접촉 선과의 슬라이딩 방향이 바람직하지 않기 때문입니다. 발작을 방지하기 위해 웜 - 강철, 휠 - 청동 또는 주철과 같은 특수 마찰 방지 재료가 사용됩니다.

도 4 11.24. 웜 포용 세력
마모의 강도는 접촉 응력에 따라 다릅니다. 주요 계산은 접촉 응력에 의해 수행됩니다. 굽힘 응력의 계산은 테스트로 수행됩니다.
접촉 응력의 계산. 방정식
 (11.74)
(11.74)
웜기어의 계산에 사용됩니다. 아르키메데스 웜의 경우, 축 방향 단면에서 웜의 회전의 곡률 반경은 ρ 1 =입니다. 그런 다음 식 (11.2)을 고려한 식 (11.8)을 통해
헬리컬 기어와 유사하게 웜 기어 유닛로드
여기서는 접촉 선의 전체 길이입니다 (그림 11.22 참조). α = 1,8 ... 2,2 - 웜휠의 중간면에서 중첩되는면 계수; ≈ 0.75는 원주 2δ의 전체 원호를 따라 접촉이 보장되지 않기 때문에 접촉 선의 길이 감소를 고려한 계수입니다. 공식 (11.74)에서 대체 한 후에 우리는
불리한 점, 분류, 바퀴의 재료
가치 전달 : 디자인의 특징, 장점 및
웜 기어는 웜이라고하는 나사와 헬리컬 기어의 일종 인 웜휠로 구성됩니다. 변속기 축의 축이 교차하며 교차 각도는 보통 90 °입니다.
그림 1
헬리컬 휠과는 달리, 웜 휠 림은 오목한 모양을 가지며, 이는 웜의 특정 적합성에 기여하고, 그에 따라 접촉 선의 길이가 증가합니다. 웜의 스레드는 단일 또는 다중 (2, 4) 일 수 있습니다.
장점 :
큰 기어비를 얻을 수있는 가능성;
부드럽고 조용한 작동;
자동 제동을 얻을 수있는 가능성 (입력 변경시).
단점 :
상대적으로 낮은 효율 (단일 스레드 웜 - 0.72, 2 스레드 - 0.8, 4 스레드 - 0.9).
휠에 값 비싼 마찰 방지 재료를 사용할 필요가 있습니다.
마모 및 열 증가.
웜기어는 다양한 기준에 따라 분류됩니다.
1) 웜의 형태로 :
원통형 웜 (그림 2a);
globoid 웜 (그림 2b);
B) globoid 웜
그림 2
2) 웜 코일의 형상의 형상 :
아르키메데스 웜 (GOST 19036-81에 따르면 -ZA로 표시) 축 방향 단면에서 이빨 모양은 사다리꼴 형태를 띠고, 마지막 부분 - 아르키메데스 나선형 (그림 3a)의 모양;
컨볼 루션 웜은 정상 구간에서 코일의 직선 윤곽을가집니다 (그림 3b).
적은 수의 치아와 큰 경사각을 가진 헬리컬 기어를 나타내는 인 벌 류트 웜 (Inverseute Worm, ZJ) (치아는 인벌 류트 프로파일을가집니다 (그림 3c).
그림 3
높은 슬라이딩 속도로 인해 웜 쌍 재료는 내 마찰 특성, 내마모성 및 잼 경향이 낮아야합니다.
웜은 탄소 또는 합금강으로 만들어집니다. 웜의 회전이 높은 경도로 열처리 된 커플은 후속 연삭으로 가장 높은 적재 용량을 갖습니다.
웜휠은 주로 청동으로 만들어졌으며 덜 자주 주철로 만들어졌습니다.
OF10-1, ONF와 같은 주석 브론즈가 최고의 재료로 간주되지만 비싸고 부족합니다. V s = 5 ... 25 m / s의 고속으로 적용 알루미늄 - 페로 지형 Br.AZh9-4와 같은 비 주석 브론즈는 기계적 특성이 향상되었지만 방수 특성이 감소되었습니다. 그들은 V s에 사용됩니다.<5m/c. Чугун применяют при V s <2м/с, преимущественно в ручных приводах.
웜기어의 표준 프로파일 각도는 20 °로 가정합니다. 축 방향 단면의 아르키메데스 웜, 웜과 결합하는 나선형 조인트의 정상 단면에서 볼록한 부분 (나선형 부분의 경우). 축에 평행하게 측정 된 웜의 두 인접한 회전의 각 측면의 같은 점 사이의 거리를 계산 된 단계라고하며 P로 표시합니다. 비율 P / π를 모듈이라고합니다. 모듈 (m)은 표준 매개 변수입니다. 웜의 경우, 웜 휠 - 앞면에 대해 축 방향입니다.
두 개의 움직이는 링크 - 웜과 기어로 구성되며 직교 교차 축 사이에서 회전 동작을 전송하고 변환하도록 설계되었습니다. 웜은 외부 표면이 나사 모양을 가진 링크라고합니다. 웜 휠은 비스듬한 톱니가있는 기어 휠로 웜과 결합합니다.
웜 기어 및 웜의 유형 (GOST 18498-73에 따름) :
1. 웜의 분열 표면의 출현으로
원통형 웜 기어 - 기어의 웜과 휠에는 원통형 피치와 초기 표면이 있습니다.
Globoid 웜기어 - 웜의 분리기 및 초기 표면은 트윈 웜휠의 분리 또는 초기 표면의 호의 세그먼트를 웜 축 주위로 회전시켜 형성됩니다.
2. 웜 코일의 이론적 인면 프로파일의 출현으로
Archimedes 웜 (ZA) - 프로파일은 Archimedean 나선형을 따라 만들어집니다.
Involute worm (ZI) - 프로필은 원의 나선형으로 만들어집니다.
Convolute worm (ZN) - 프로파일은 기다란 인벌 류트를 따라 만들어집니다.
(그림 14.4)
원통형 웜 기어의 기어링 형상 :
원통형 웜기어의 기어링 형상 계산은 GOST 19650 - 74에 의해 결정됩니다. 웜의 주요 매개 변수들 - 초기 실린더의 직경 d w1, 헬릭스 pz1의 경로 및 경사각 bw - 사이의 관계는 다음과 같이 설정됩니다
(그림 14.5)
![]()
나선의 경로 사이의 연결 pz1 피치 다중 나사 p1
![]()
기어 형상 계산 :
원시 데이터
m - 축 모듈;
q - 웜의 직경 계수.
z1 - 웜의 회전 수.
aw - 중심 거리;
x - 웜의 변위 계수.
너- 기어비.
공구 매개 변수
h * = (h * w + c * 1) - 코일의 높이 비율.
h * a - 머리 높이 비율;
s * - 설계 두께 계수;
r * f - 전이 곡선의 곡률 반경 계수.
c * 1,2 = 0.25 ... 0.5 ; s * = 0.75 h p ; r * f = 0.3 ... 0.45
(그림 14.6)

기하학적 매개 변수 계산 :
1. 바퀴의 잇수
2. 오프셋 계수 (중심 거리가 설정된 경우)
* 중심 거리 (옵셋 계수가 지정된 경우)
3. 피치 직경
![]()
4. 시작 직경
![]()
5. 피치 각 웜 코일
![]()
6. 시작 각도 웜 코일
7. 상승의 주각 웜 코일 (ZI 웜 전용)
웜의 주 직경
![]()
8. 높이 웜 코일
9. 머리 높이 웜 코일
10. 정점 직경
웜의 전환
중간면에서 웜 휠의 톱니
11. 트로프 직경
웜 휠
12. 가장 큰 직경 웜 휠
13. 크라운 너비 웜 휠
14. 절단 된 부분의 길이 웜 (x = 0)
기하학의 기하학적 품질 지표 :
1. 웜 휠 치아를 트리밍하는 경우
(작은 앙각에서 웜휠 샤프트에서 웜으로의 이동이 불가능 해짐)
단점 :
치아 선을 따라 높은 미끄럼 속도를 가지므로 증가하는 경향이있다 (웜 기어 링 기어에는 특수한 윤활제 및 재료가 필요합니다.), 낮은 효율과 높은 방열.
웜기어 - 토크를 전송하도록 설계된 운동 쌍. 그것은 벌레와 바퀴로 구성되어 있습니다.
필수 조건 - 그들 사이의 샤프트가 직각을 이룹니다. 다음과 같은 이점이 있습니다.
- 증가 된 기어비 (최대 300 이상);
- 매끄러운 접촉 및 소음 없음;
- 전송 된 전력은 60kW에 이른다.
운동 쌍의 빼기 부분은 다소 낮은 효율 (0.7-0.92)을 가지고 있으며, 강한 가열과 장기간의 작동으로 빠르게 실패 할 수 있습니다. 동시에, 바퀴가 만들어지는 청동의 비용은 꽤 높습니다.
우리 회사는 그림 및 완료 샘플에 따라 전송을 작고 큰 배치로 만듭니다.