Vispārīga informācija un rīku klasifikācija. Pārnesumi
Pārnesumi
Konstrukcijas
Pārnesumu nomaiņa un remonts
Metodes ar garozas labošanas rīkiem
Pārnesumi
Nodiluši un remontēti rīki
Atsauces
1. VADĪBA
1.1. Konstrukcijas
Gears tiek izmantoti gandrīz visos mehānismos, ar kuriem ir aprīkotas metalurģijas darbnīcas (celtņi un lifti, rullīšu galdi, vinčas metināšanas ierīces, dzirnaviņas uc)
Pārnesumu galvenās daļas ir zobrati (zobrati). Tie kalpo rotācijas pārvietošanai no vienas vārpstas uz citu, ja vārpstas nav vienā un tajā pašā asī.
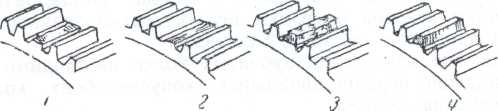
Atkarībā no vārpstas relatīvā stāvokļa tiek izmantoti rīki: cilindriska, koniska un spirālveida.
Cilindriska pārnesumkārba kalpo, lai pārvietotu rotāciju no vienas paralēlas vārpstas (1. att., A).
Zobratu pārnesumkārba kalpo, lai pārvietotu rotāciju no vārpstas uz vārpstu, kas atrodas ar asu krustpunktu (1.6. Att.).
Spirālveida pārnesumu izmanto, lai pārvietotu rotāciju no vārpstas uz asi, kas atrodas ar krustojošām, bet ne krustojošām asīm (1. att., C).
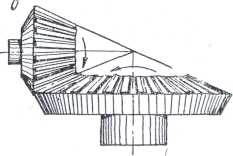
Att. 1. Zobrati: a - cilindriski: b - slīpums: ieskrūvē: g-chevron pārnesums.
Zobratu un grābekli izmanto, lai pārveidotu rotācijas kustību progresīvā atgriešanās režīmā
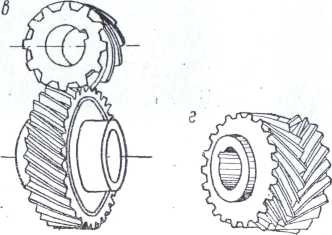
Cilindrisko riteņu zobi var būt taisni (1. att., A un b), slīpi un četrstūris (Ziemassvētki). 1,
Chevron pārnesums sastāv no diviem pārnesumiem, kas savienoti ar slīpiem zobiem.
Ja ir ieslēgti zobrati ar taisniem zobiem, vienlaicīgi tiek ieslēgts viens vai divi zobi, kā rezultātā pārneses darbu pavada daži jerks.
Gludāku pārnesumu darbība tiek panākta, izmantojot slīpi vai zobu zobus, jo palielinās iesaistīšanās zobu skaits.
Pārnesumu riteņi ir izgatavoti no tērauda kalumiem, tērauda lējumiem un velmētiem produktiem vai no dzelzs lējumiem. Kritiskiem zvejas rīkiem (piemēram, pacelšanas mašīnām) čuguna rīku izmantošana nav atļauta.
Zvejas rīku klasifikācija. Atkarībā no pārnesuma mērķa, zoba veida un rotācijas ātruma pārnesumi ir sadalīti četrās pārnesumu precizitātes klasēs atbilstoši ražošanas un montāžas pielaidēm (119. tabula).
1. tabula Zvejas rīku klasifikācija
|
Pieļaujams |
||||
|
Pārnesumu veids |
rajona ātrums |
Piezīme |
||
|
pieaugums, m / s |
||||
|
Cilindrisks |
Piesakies, ja precizitāte |
|||
|
un gludumam nav |
||||
|
vērtības, kā arī |
||||
|
Konisks |
manuāla un nav ielādēta |
|||
|
rīkiem |
||||
|
Cilindrisks |
||||
|
Konisks |
||||
|
Cilindrisks " |
||||
|
Konisks |
||||
|
Cilindrisks |
1 Ar lielām prasībām |
|||
|
1 vienmērīga pārraide |
||||
|
Konisks |
vai arī skaitot |
|||
|
mehānismus |
Pārnesumi ir atvērti, daļēji atvērti un aizvērti.
Atvērtā saucamā pārvade, kurai nav korpusa (tvertnes) eļļas vannai; šādi rīki tiek regulāri ieeļļoti ar smērvielu. Parasti šie rīki ir zema ātruma un tiek izmantoti galvenokārt vienkāršās mašīnās un mehānismos.
Daļēji atvērtie pārnesumi atšķiras no atvērtajiem, ja tvertne atrodas šķidrā eļļas vannā.
Slēgta zvanu pārraide, kas kopā ar gultņiem ir uzstādīta speciālos korpusos.
Pārnesumkārbas pārnesumi ir ieeļļoti dažādos veidos:
1) ar pārnesumu ātrumu virs 12–14 m / s-strūklas metodi ar zobratu padevi zobratu pārnesumu sākšanas zonai;
2) ar pārnesumu ātrumu zem 12 m / s - iemērcot.
Ieeļļojot, jāapsver:
a) lielāks pāris pārnesums ir iegremdēts eļļā divas līdz trīs reizes lielāks par zoba augstumu;
b) ja pārnesumkārbai ir vairāki posmi, eļļas līmeni nosaka, ņemot vērā pārvades ātrumu.
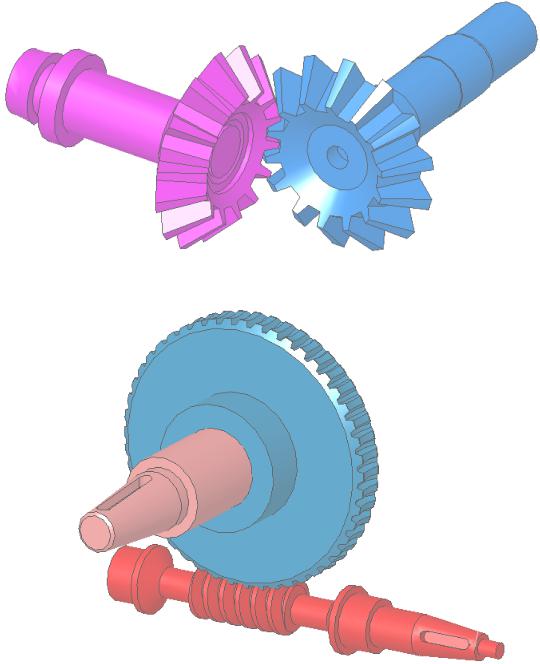
Pēdējā gadījumā b līmenis (2. attēls) ir pieļaujams, ja zema ātruma pārnesumkārba rotē ar nelielu ātrumu. Pārnesumkārbās ar vidēju un lielu
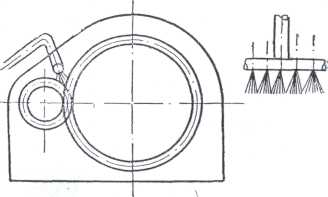
Att. 2. Jet eļļošanas rīki.
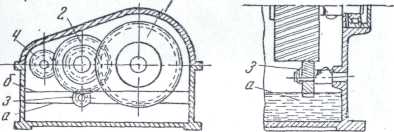
Att. 3. Shēmas eļļošanas rīku iemērkšana.
zemo riteņu ātrums, pēdējie ir iegremdēti divās līdz trīs reizes augstāka riteņa zoba augstumā, un eļļa tiek izlietota līdz a līmenim. pirmā posma eļļošana uzliek papildu pārnesumu 3 ar šauru zobu, kas nodrošina darbrata smērvielu.
Pārnesumkārbas ielietās eļļas viskozitāte tiek izvēlēta atkarībā no ātruma un slodzes - parasti no 4 līdz 12 ° E temperatūrā, lai noteiktu viskozitāti 50 ° C. Tiek ņemti vērā arī temperatūras apstākļi, kuros ierīce darbojas. augstākās temperatūrās zemākas viskozitātes eļļu izmanto zemākas viskozitātes apstākļos.
Atvērtie pārnesumi parasti tiek ieeļļoti ar taukiem (tauki, konstantes utt.).
Lai izvairītos no eļļas noplūdes un putekļiem pārnesumkārbā, ļoti rūpīgi jāveic iepakojuma blīvējumi (rasējumi) gultņos un gar pārnesumkārbas korpusa līniju.
Nodiluši un remontēti rīki
Zobrati neizdodas divu galveno iemeslu dēļ: zobu nodilums un bojājumi.
Nodilums parasti ir: 1) nepilnīga saķere un 2) palielināta berze (pakāpeniska nolietošanās).
Pirmajā gadījumā valkāšana galvenokārt ir sliktas uzstādīšanas rezultāts un ar pienācīgu montāžu (stingri ievērojot radiālo atstarpi) parasti nav. Tomēr radiālās atstarpes izmaiņas var būt arī gultņu korpusu attīstības sekas, un gultņu izstrādes rezultātā var būt vai nu radiālā atstarpes palielināšanās, vai arī tā samazinājums (darbība).
Ja slodze uz starplikām tiek pārnesta uz sāniem, kas ir pretēji savienojumam darba procesā, jo ir izveidotas čaulas, iespējams radiālā atstatuma palielinājums.
Ja starpliku slodze tiek pārnesta uz kordona sānu (piemēram, pie celtņa slīpmašīnu pārnesumiem, strādājot, kad tiek veidots starplikas (šajā slīdņa ieliktņa piemērā), radiālo atstarpi var samazināt.
Abos gadījumos pēc starplikas maiņas tiek atjaunots radiālais attālums.
Pakāpeniska nolietošanās no palielinātas berzes ir atkarīga no vairākiem apstākļiem, tostarp no materiāla cietības, no kā tiek veikti pārnesumi, termiskā apstrāde, pareiza smērvielu izvēle, nepietiekama eļļas tīrība un savlaicīga to maiņa, pārslodzes pārslodze utt.
Pareiza uzstādīšana un laba uzraudzība ekspluatācijas laikā ir galvenie nosacījumi ilgstošai un nepārtrauktai iekārtu darbībai.
Zobratu zobu kļūmes rodas šādu iemeslu dēļ: pārnesums pārnesumā, vienpusējs (no viena zoba gala) slodze, zobu pazemināšana, nenovēršamas plaisas apstrādājamā materiālā un mikrokrāsa, jo slikti veikta termiskā apstrāde, vāja metāla pretestība (jo īpaši lējumu neizkausēšanas rezultātā) un kalumi), palielināti satricinājumi, hit starp cieto priekšmetu zobiem utt.
2.1 Pārnesumu nomaiņa un remonts.

Att. 4. Zobu remonts ar skrūvgriežu palīdzību, kam seko metināšana
Parasti zobratus ar nodilušiem un salauztiem zobiem nevajag labot, bet nomainīt, un ieteicams abus riteņus nomainīt vienlaicīgi. Tomēr, ja lielais ritenis pārnesumā ir daudzkārt lielāks par mazo riteņu, ir nepieciešams savlaicīgi nomainīt mazo riteni, kas ar ātrumu pārslēdzas ātrāk nekā lielais. Savlaicīga mazā riteņa nomaiņa aizsargās lielo riteņu nodilumu.
Zobratu zobu nodilums nedrīkst pārsniegt 10-20%: zoba biezums, skaitot pa sākotnējā apļa loka garumu. Zema reakcijas pārnesumos zobu nodilums ir pieļaujams līdz pat 30% no zobu biezuma, atbildīgu mehānismu pārnesumos tas ir daudz zemāks (piemēram, slodzes pacelšanas mehānismiem nodilums nedrīkst pārsniegt 15%: zobu biezums, kā arī ar celtņa mehānismu, kas pārvadā šķidru un karstu metālu, riteņu riteņi) līdz 10% ")
Pārnesumi ar cementētiem zobiem ir jānomaina, ja cementēšanas slānis ir nēsāts virs 80% 1 no tā biezuma, kā arī tad, ja krekinga, šķembas vai pīlinga slānis ir slānis.
Ja zobu pārrāvumi, bet ne vairāk kā divi pēc kārtas nav ļoti svarīgi pārnesumi (piemēram, celtņa kustības mehānismi), tos var atjaunot šādi: sadalīti zobi tiek sagriezti zemē, caur zobu platumu tiek izurbti divi vai trīs caurumi, un pavedieni tiek sagriezti, tie izgatavo tapas un ieskrūvē tos sagatavotajos caurumos, metina tapas uz pārnesumu un metina metālu, izmantojot elektrisko metināšanu, dodot tai zobu formu, pārnesumu griešanas, frēzēšanas vai ēvelēšanas mašīnu vai nododot pievienot metinājuma metāls zobu formu un pēc tam atšķaida ar profila konjugāts pārbauda sajūga gabals un veidni.
Zobu atjaunošanas operāciju secība, izmantojot metināšanu, parādīta 1. attēlā. 298.
Lai atvieglotu L-reto un lielo moduļu zobu pēcapstrādes procesu, ieteicams tos metināt
Att. 5. Darbību secība zobu metināšanas laikā:
1 - bojāts zobs; 2) griezuma zobu vieta; 3 - metināt zobu uz papēžiem; 4 - apstrādāts (zāģēts) zobs.
vara modelis (299. att.), kura izmantošana balstās uz faktu, ka vara modelis, kura forma ir zobratu forma, veido zoba malas. Metinot, pateicoties vara augstajai siltumvadītspējai, metāls nav metināts ar šablonu un pēc virsmas pārklāšanas ir viegli noņemt, un metināt metālu, lai veidotu zoba formu.
![]()
Att. 6. Zobu metināšanas metode:
1 - labojamie rīki;
2 - metināšanas zobs; 3 - vara modelis.
Virsmas virsmas ir obligāti jāveic ar augstas kvalitātes (bieza taukviela) zīmola elektrodiem, kas nav zemāki. Pēc pārklāšanas vēlams atkausēt.
Īpaši svarīgiem mehānismiem (piemēram, celtņu pacelšanas mehānismiem) zobu pārklāšana (remonts) nav atļauta, pārnesumu riteņi šajos gadījumos jāaizstāj ar jauniem.
Nenostipriniet dažāda veida zobus ar skrūvgrieži bez metināšanas vai gropē, jo šīs metodes ir neuzticamas un nenodrošina iekārtas normālu darbību.
Pārnesumi ar pārsprāgtām loksnēm parasti tiek remontēti ar loka metināšanas palīdzību, attīstot metināšanas tehnoloģiju, lai metināšanas rezultātā nerastos papildu spriegumi, kas izraisa plaisas citos riteņu elementos (ieteicams visu pārnesumu uzsildīt līdz sarkanai karstai un arī pēc metināšanas).
Zobratus ar plaisu rumbā labo, nolaižoties uz tērauda lencēm, kas ir speciāli kalti vai izliekti un mehāniski apstrādāti ar mašīnu, kas karsē līdz 300-400 ° C.
Nomainīti īpaši svarīgu pārnesumu pārnesumi (piemēram, celtņa pacelšanas mehānismi), kuriem ir plaisas “bodē”, spieķiem un rumbai; remonts nav atļauts, izmantojot metināšanu vai citu metodi.
Riteņiem, kas rotē lielā ātrumā, kā arī lielā diametra pārnesumiem vidējā ātrumā, jāveic statiskā balansēšana.
2.2 Ātruma labošanas rīku metodes
Ātrgaitas remonta rīki, kā arī citi aprīkojuma elementi saskaņā ar. viņa tehnikai jābūt mezglam.
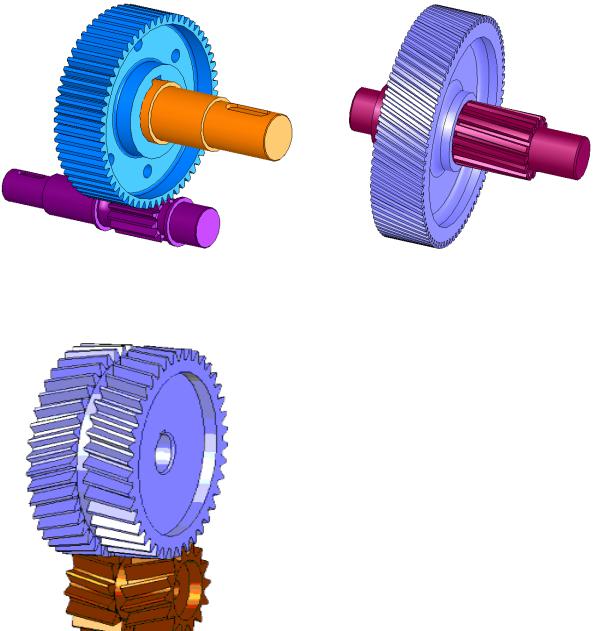
Ja ātrgaitas mezglu remonts nomaina atsevišķus rīkus vai rīkus: nav veikti, tos aizstāj ar iepriekš samontētiem mezgliem, un, kā norādīts iepriekš, apsverot mezglu tipus kā remonta un uzstādīšanas vienības, var būt trīs:
lieliem mezgliem, kas ietver strīdīgas lietas
(piemēram, pārnesumkārbas korpusi) un visu zobratu komplektu, kas uzstādīti šajos korpusos;
savstarpēji savienotu grupu ar atsevišķu mezglu pārnesumu (piemēram, vārpstas, poz. /, 2, 3 kopā ar tām; detaļas, kas uz tām piestiprinātas);
atsevišķiem mezgliem, kas ietver rīkus.
Atkarībā no īpašajiem apstākļiem, kas raksturīgi šim remontam, viens no norādītajiem mezglu remonta veidiem ir pieņemts darba organizācijas plānā.
Kvalitatīvākais ir ātrgaitas remonts, ko veic, aizstājot atsevišķus lielus mezglus - pārnesumkārbas.
Tomēr šajā gadījumā ir nepieciešams, lai, pirmkārt, demontējamās un atkārtoti montējamās pārnesumkārbas būtu savstarpēji aizvietojamas, un, otrkārt, attiecīgais takelāžas aprīkojums būtu jāsagatavo iepriekš.
Pārnesumkārbu tipizēšana, t.i., apstiprinājums konkrētam darbnīcai vai uzņēmumam kopumā ar dažu veidu un izmēru maināmām pārnesumkārbām ir vissvarīgākais pasākums, kas nodrošina ātru un kvalitatīvu remontu.
Atsauces
Montāžas mašīnas smagajā inženierijā / B.V. Fedorov, V.A. Vavulenko et al., 2. izdevums: Mash-e, 1987.
Tehnologa-mašīnbūves rokasgrāmata: 2 tonnas. Rediģēja AG Kosilova M.: Mash-e, 1985.
Metāla griešanas mašīnas. Apmācība Rokasgrāmata tehniskajām koledžām. N.S. Kolevs un citi Maskavā: Mash-ie, 1980. gads.
Skhirtladze AG, Novikovs V.Yu., Tulaevs Yu.I. Mašīnu ražošanas tehnoloģiskās iekārtas. Apmācība Pabalsts. M .: Izdevniecība "Stankin", 1997.
Līdzīgas esejas:
Motora izvēle, kinemātiskais aprēķins un piedziņas ķēde. Pārnesumkārbas un piedziņas trumuļa vārpstu rotācijas ātrums un leņķiskais ātrums. Aprēķinu pārnesums. Zobu izturība pret lieces spriegumiem. Vārpstas griezes momenta aprēķins.
Zvejas rīku klasifikācija ekspluatācijas nolūkos. Pielaides sistēma piespiedu pārnesumiem. Pārnesumu un pārnesumu kontroles metodes un līdzekļi. Ierīces spārnu pārnesumu kontrolei, to pielietošanas metodes.
Piedziņas bloka kalpošanas laika aprēķināšana. Motora izvēle, piedziņas kinemātiskais aprēķins. Materiālu pārnesumu izvēle. Pieļaujamo spriegumu noteikšana. Slēgta konusveida zobrata aprēķins. Noslēgto pārnesumu pārnesumu spēku noteikšana.
Cilindriskas divpakāpju pārnesumkārbas konstrukcijas izpēte, vispārējo un savienojošo izmēru mērīšana. Zobratu parametru noteikšana. Pieļaujamās slodzes aprēķins no apstākļiem, kas nodrošina pārnesuma saskares izturību.
Spur pārnesumkārbas dizains. Piedziņas motora izvēle. Aprēķinātais lieces spriegums bīstamās zobratu zonā. Zobratu un virsbūves elementu konstruktīvie izmēri. Pārnesumu pāra galvenie parametri. Aptuvens šahtu aprēķins.
Kinemātiskais jaudas aprēķins. Jaudas noteikšana uz piedziņas vārpstas. Motora vārpstas paredzamās jaudas noteikšana. Pievadu vārpstas apgriezienu skaita noteikšana. Aizvērtu cilindrisko pārnesumu aprēķins.
Pagriežamās sviras mehānismus izmanto, lai pārveidotu rotācijas vai translācijas kustību jebkurā kustībā ar vajadzīgajiem parametriem. Berzes - lai mainītu rotācijas kustības ātrumu vai pārvērstu rotāciju uz translāciju.
Griešanas rīku teorētisko pamatu izpēte, vadot pārnesumu plauktu. Riteņu profilu konstruēšana, izmantojot ierīci. Cilindriska riteņa zobu frēzēšana. Zoba forma atkarībā no nobīdes. Sliedes stāvoklis attiecībā pret riteni.
Kinemātiskās piedziņas siksnas konveijers. Elektromotora kinemātiskais aprēķins. Elektromotora nepieciešamās jaudas noteikšana, kinemātisko aprēķinu rezultāti uz vārpstām, motora vārpstas leņķiskais ātrums. Aprēķinu pārnesums.
Pārnesumu mehānisma izskata apraksts. Kinemātiskais aprēķins. Transmisijas ģeometrijas un tā detaļu aprēķināšana. Jaudas aprēķināšanas mehānisms. Zobratu aprēķins attiecībā uz izturību, viena mehānisma vārpstas stiprību. Būvmateriālu izvēle.
Motora paredzētās jaudas noteikšana, pārnesumu attiecība. Piedziņas vārpstu un griezes momentu pārraidītās jaudas aprēķins. Zema ātruma un konusveida zobratu, vārpstas gultņu konstrukcijas aprēķins par statisko slodzi.
Metode trīspakāpju cilindriskās pārnesumkārbas projektēšanai. Pieļaujamo spriegumu noteikšanas procedūra. Trīs ātrumu pārnesumkārbas, starpposma šahtu un to gultņu aprēķina iezīmes. Keyed locītavu izturības pārbaudes specifika.
Planētu pārnesumu priekšrocības un trūkumi, salīdzinot ar parastajiem pārnesumiem, darbības joma. Planētu zvejas rīku darbības princips un galvenās saites. Viļņu pārnesumi, konstrukcijas shēma, darbības princips, viļņu pārraides priekšrocības un trūkumi.
Cilindrisko spirālveida pārnesumu parametri. Pārnesumu dizains un materiāli, to izmērs un forma. Bevel zobrati un tā ģeometriskais aprēķins. Tārpu pārnesumu projektēšana un aprēķināšana. Tārpu pārnesumu galvenās priekšrocības un trūkumi.
Tārpu pārnesumu dizains. Cilindriska pārnesumu konstrukcija. Pārnesumkārbas mirušās gājiena aprēķins. Precīzijas pārnesumi un tārpu pārnesumi. Zobratu, tārpu virsmu formas un izvietojuma pielaides. Vārpstas konstrukcijas elementi.
Elektromotora pārvades un izvēles kinemātiskais aprēķins. Cilindriskās transmisijas aprēķins. Aptuvens šahtu aprēķins. Pārnesumkārbas galveno izmēru aprēķināšana. Gultņu un savienojumu izvēle. Pārnesumu smērvielas un gultņu izvēle.
PĀRVADĀJUMI
P l un l līdz c un u
1. Vispārīga informācija.
2. Zvejas rīku klasifikācija.
3. Zobratu ģeometriskie parametri.
4. Parametru konversijas precizitāte.
5. Dinamiskie rādītāji pārnesumos.
6. Riteņu konstrukcija. Materiāli un pieļaujamie spriegumi.
1. Vispārīga informācija
Pārnesumu vilciensIr mehānisms, kas ar zobratu palīdzību pārvieto vai pārveido kustību, mainot leņķisko ātrumu un momentus. Pārnesumu vilciens sastāv no riteņiem ar zobiem, kas savstarpēji savienojas, veidojot virkni secīgu cam mehānismu.
Pārnesumi tiek izmantoti, lai pārveidotu un pārvietotu rotācijas kustību starp šahtām ar paralēlām, krustojošām vai krustojošām asīm, kā arī lai pārvērstu rotācijas kustību uz translācijas un otrādi.
Zobratu priekšrocības:
1. Pārnesumu attiecībai.
2. Darba uzticamība un izturība.
3. Kompakts.
4. Liels pārraidīto ātrumu diapazons.
5. Zems spiediens uz vārpstām.
6. Augsta efektivitāte.
7. Vienkārša apkope.
Zobratu trūkumi:
1. Nepieciešamība pēc augstas precizitātes ražošanas un uzstādīšanas.
2. Troksnis lielā ātrumā.
3. Bezgalīgi mainīgas transmisijas attiecības neiespējamība
sesijas i.
2. Zvejas rīku klasifikācija
Mehāniskajās sistēmās izmantotie rīki ir dažādi. Tos izmanto gan leņķa ātruma samazināšanai, gan palielināšanai.
Pārnesumu pārveidotāju dizainu klasifikācija grupē pārraides trīs veidos:
1. Pēc zobu piesaistes veida. Tehniskajās ierīcēs tiek izmantotas transmisijas ar ārējo (5.1. Att., A), ar iekšējo (5.1. Att., B) un ar zobratu (5.1. Attēls, c) zobratu pārnesumu.
Pārraidi ar ārējo zobratu tiek izmantoti rotācijas kustības pārveidošanai ar kustības virziena maiņu. Pārnesumu attiecība ir no –0,1 i –10. Iekšējo zobratu pārnesumu izmanto gadījumā, ja rotācijas kustība ir jāpārvērš ar virziena saglabāšanu. Salīdzinot ar ārējo zobratu pārnesumu, transmisijai ir mazāki izmēri, lielāks pārklāšanās koeficients un pastiprināta izturība, bet to ir grūtāk ražot. Rotaļu zobratu pārnesumu izmanto, kad rotācijas kustību pārvērš translācijas un atpakaļ.
2 Savstarpēji sakārtojot vārpstas asis nošķirt transmisijas cilindriskos riteņus ar paralēlām šahtu asīm (5.1.a ), konusveida riteņi ar krustojošām asīm (5.2. attēls), riteņi ar krustojošām asīm (5.3. attēls). Pārnesumiem ar konusveida pārnesumiem ir mazāks pārnesumskaitlis (1/6i 6) ir grūtāk ražot un ekspluatēt, tām ir papildu asu slodzes. Skrūvju riteņi strādā ar palielinātu slīdēšanu, ātrāk valkāt, ar zemu slodzes spēju. Šie pārnesumi var nodrošināt dažādus pārnesumu koeficientus tādiem pašiem riteņu diametriem.
3 Zobu novietojums attiecībā pret veidojošo riteņa apmali
ir zobratu pārnesumi (5.4. attēls, a), spirālveida pārnesumi (5.4. attēls, b), chevron (5.5. attēls) un ar apļveida zobiem.
Spirālveida transmisijai ir liels |
||||
Šujas līdzenums, mazāk |
||||
tehnoloģiski | ekvivalents |
|||
rodas, bet rodas pārraide |
||||
papildus | slodze. |
|||
Dubultā spirālveida pārnesums | skaitītājs |
|||
slīpi zobi (chevron) |
||||
cha ir visas spirālveida priekšrocības |
||||
un līdzsvarotiem asu spēkiem. Bet |
||||
nodošanu ir nedaudz grūtāk ražot |
||||
lenia un uzstādīšana. Līklīnija |
||||
zobi visbiežāk tiek izmantoti zirgā |
||||
rīkiem | uzlabot |
|||
kravnesība | gludums |
|||
strādāt lielā ātrumā. |
||||
3. Zobratu ģeometriskie parametri
Uz galvenie pārnesumu riteņu ģeometriskie parametri (5.6. Att.) Ietver: zobu slīpumuP t, mod m (m = P t /), zobu skaits Z, slīpuma apļa diametrs d, zoba dalījuma galvas augstums h, zoba dalāmās kājas augstums h f, virsotņu un dobumu apļa diametrs d un d f, pārnesumu platums.
df 1 | db 1 | |||
dw 1 (d1) | ||||
da 1 | ||||
df 2 | dw 2 (d2) | da 2 |
||
db 2 | ||||
Sprauga apļa diametrs d = mZ. Riteņa zoba garums ir sadalīts piķa galvā un slīpuma kājas garumā, kura lieluma attiecību nosaka riteņa un instrumenta tukšuma relatīvais stāvoklis zobu griešanas procesā.
Ja sākotnējā kontūra ir nulle, tad sadalītāja galvas un riteņa zoba kājas augstums atbilst sākotnējās kontūras augstumam, t.i.
ha = h a * m; hf = (h a * + c *) m,
kur h a * ir zoba galvas augstuma koeficients, c * ir radiālais koeficients
Riteņiem ar ārējiem zobiem apļa virsmu diametrs
da = d + 2 ha = (Z + 2 h a *) m.
Caurumu perimetra diametrs
df = d –2 hf = (Z –2 h a * –2 c *) m.
Ja m ≥ 1 mmh, a * = 1, c * = 0,25, d a = (Z - 2,5) m.
Riteņiem ar iekšējiem zobiem augšējo un apakšējo riteņu apļa diametrs ir šāds:
da = d –2 ha = (Z –2 h a *) m;
df = d + 2 hf = (Z + 2 h a * + 2 c *) m.
Riteņiem, kas ir izgriezti ar nobīdēm, virsmu un ieleju diametrus nosaka, pamatojoties uz kompensācijas koeficienta lielumu sarežģītākām atkarībām.
Ja ir ieslēgti divi riteņi, kas sagriezti bez pārvietošanas, tad to piķis aplis, tas ir, tie sakrīt ar sākotnējiem lokiem. Šajā gadījumā ieslēgšanās leņķis būs vienāds ar sākotnējās kontūras profila leņķi, t.i., sākotnējās kājas un galviņas sakrīt ar dalāmām kājām un galvām. Centrālais attālums būs vienāds ar sadalīto centra attālumu, ko nosaka sadalītāju loku diametrs:
aw = a = (d1 + d2) / 2 = m (Z1 + Z2) / 2.
Attiecībā uz riteņiem, kas griezti ar nobīdi, ir atšķirība sākotnējā un piķa diametrā, t.i.
d w 1 d 1; d w 2 d 2; a w a; αw = α.
4. Parametru konversijas precizitāte
In pārnesumu darbības laikā teorētiski nemainīga pārnesumu attiecība notiek nepārtraukti. Šīs izmaiņas izraisa neizbēgamas kļūdas zobu izmēru un formas ražošanā. Risinājums ar zema jutīguma pret rīkiem rīkošanu tiek atrisināts divos virzienos:
a) īpaša profila veidu izmantošana (piemēram, ikdienas pārnesums);
b) ražošanas kļūdu ierobežošana.
In atšķirībā no tādām vienkāršām daļām kā vārpstas un bukses, pārnesumi ir sarežģītas detaļas, un kļūdas to atsevišķo elementu darbībā ne tikai ietekmē divu atsevišķu zobu savienošanu, bet arī ietekmē pārnesumu dinamiku un stiprību, kā arī precizitāti. rotācijas kustības pārvietošana un pārveidošana.
Zobratu un pārnesumu kļūdas, atkarībā no to ietekmes uz pārvades veiktspēju, var iedalīt četrās grupās:
1) kļūdas, kas ietekmē kinemātisko precizitāti, t.i., rotācijas kustības pārraides un transformācijas precizitāti;
2) kļūdas, kas ietekmē zvejas rīka netraucētu darbību;
3) saskares traipu zobu kļūdas;
4) kļūdas, kuru rezultātā mainās sānu atstarpe un kas ietekmē pārnesuma mirušo gājienu.
Katrā no šīm grupām var atšķirt sarežģītās kļūdas, kas visprecīzāk raksturo šo grupu un elementus pa daļām, daļēji aprakstot pārraides veiktspējas rādītājus.
Šī kļūdu dalīšana grupās ir pamats standartu noteikšanai rīkiem: GOST 1643–81 un GOST 9178–81.
Lai novērtētu transmisijas kinemātisko precizitāti, gludu rotāciju, zobu kontaktu raksturlielumus un mirušo strāvu attiecīgajos standartos, tiek izveidoti 12 precizitātes ražošanas rīki.
un rīkiem. Precizitātes pakāpi dilstošā secībā norāda skaitļi. 1–12. Precizitāte 1 un 2 saskaņā ar GOST 1643–81 par m\u003e 1 mm un saskaņā ar GOST 9178–81 par 0,1 Ir atļauts izmantot pārnesumu riteņus un pārnesumus, kuru kļūdu grupas var būt dažādas precizitātes pakāpes. Tomēr vairākas kļūdas, kas pieder pie dažādām grupām, ietekmējot pārraides precizitāti, ir savstarpēji saistītas, tāpēc ir noteikti ierobežojumi precizitātes standartu kombinācijai. Līdz ar to gluduma normas var būt ne augstākas par diviem grādiem precīzākas vai vienu grādu stingrākas nekā kinemātiskās precizitātes normas, un zobu kontakta ātrumu var piešķirt jebkuram grādam, kas ir precīzāks par gluduma normām. Precizitātes standartu kombinācija ļauj dizainerim radīt visekonomiskākos pārraides, izvēloties atsevišķus rādītāju precizitātes līmeņus tālruņi, kas atbilst šīs pārraides darbības prasībām, nepārvērtējot pārraides ražošanas izmaksas. Precizitātes pakāpes izvēle ir atkarīga no mērķa, riteņu pielietošanas lauka un zobu rotācijas ātruma. Sīkāk apskatīsim pārnesumu un pārnesumu kļūdas, kas ietekmē to kvalitāti. 5. Dinamiskie rādītāji pārnesumos Pārnesumi pārveido ne tikai kustības parametrus, bet arī slodzes parametrus. Mehāniskās enerģijas konvertēšanas procesā daļa jaudas P Tr, kas tiek piegādāta pārveidotāja ieejai, tiek iztērēta ritošā sastāva un slīdes berzes pārvarēšanai pārnesumu kinemātiskajos pāros. Rezultātā izejas jauda samazinās. Lai novērtētu zaudējumus jauda tiek izmantota efektivitātes (EFFICIENCY) jēdziens, kas definēts kā pārveidotāja izejas jaudas attiecība pret tās ieejai piegādāto jaudu, t.i. η = P / P in. Ja pārnesumkārba pārveido rotācijas kustību, tad attiecīgi ieejas un izejas jauda var tikt definēta kā Apzīmējiet ωout / ωin ar i, un vērtību Tout / Tin caur i m, ko mēs saucam par momentu attiecību. Pēc tam izteiksme (5.3.) Ir veidlapa η = i m Η vērtība svārstās no 0,94 līdz 0,96 un ir atkarīga no pārraides veida un nosūtītās slodzes. Pārnesumu cilindriskajai transmisijai efektivitāti var noteikt atkarībā no atkarības η = 1 - cf π (1 / Z 1 + 1 / Z 2), kur c ir korekcijas koeficients, kas ņem vērā efektivitātes samazināšanos, samazinot pārraidīto jaudu; 20T no 292mZ 2 20T no 17mZ 2 kur T o ir izejas moments, H mm, f ir berzes koeficients starp zobiem. Lai noteiktu faktisko spēku uz zobu zobiem, apsveriet roma ir slodzes pārveidošanas process (5.7. Attēls). Ļaujiet braukšanas ieejas momentu T 1 iedarbināt uz piedziņas mehānismu 1 ar sākotnējā apļa diametru d w l, un piedziņas riteņa 2 pretestības moments T2 ir vērsts pretējā virzienā pret riteņa rotāciju. Invertācijas gadījumā kontaktpunkts vienmēr atrodas uz līnijas, kas ir parasts parastais kontaktu profiliem. Līdz ar to piedziņas riteņa zobstieņa spiediena spēks uz vergu zoba tiks virzīts pa normālu. Mēs nodosim spēku gar darbības līniju uz saiknes polu un sadalīsim to divās daļās. Ft ” Ft ” Tiek saukts F t pieskares elements rajona spēks. Viņa veic lietderīgu darbu, pārvarot pretestības momentu T un braucot ar riteņiem. Tās vērtību var aprēķināt pēc formulas F t = 2T / d w. Komponentu vertikāli sauc radiālais spēksun to apzīmē ar F r. Šis darba spēks nerada, tas tikai rada papildu slodzi uz vārpstām un transmisijas balstu. Nosakot abu spēku lielumu, var neņemt vērā berzes spēkus starp zobiem. Šajā gadījumā starp zobu kopējo spiedienu un tā sastāvdaļām pastāv šādas atkarības: F n = F t / (cos α); F r = F t tg α / cos, kur α ir sasaistes leņķis. Piespiedu riteņu ieslēgšanai ir vairāki būtiski dinamiski trūkumi: ierobežotas pārklāšanās vērtības, ievērojams troksnis un triecieni lielos ātrumos. Lai samazinātu transmisijas lielumu un samazinātu darba gludumu, cilindrisko rīku bieži aizstāj ar spirālveida pārnesumu, kura sānu profili ir involētas spirālveida virsmas. Spirālveida pārnesumos kopējais spēks F ir vērsts perpendikulāri zobam. Mēs sadalām šo spēku divās sastāvdaļās: F t ir riteņa apkārtmērs, un F a ir aksiālais spēks, kas vērsts gar riteņa ģeometrisko asi; F a = F t tg β, kur ir zoba slīpuma leņķis. Tādējādi, atšķirībā no piespiedu pārnesuma, spirālveida pieslēgumā darbojas trīs savstarpēji perpendikulāri spēki Fa, F r, F t, no kuriem tikai F t dara noderīgu darbu. 6. Riteņu konstrukcija. Materiāli un pieļaujamie spriegumi Riteņu dizains.Pētot zobratu projektēšanas principus, galvenais mērķis ir apgūt riteņu formas un pamatparametru noteikšanas metodi atbilstoši ekspluatācijas un ekspluatācijas apstākļiem. Šī mērķa sasniegšana ir iespējama, risinot šādus uzdevumus: a) optimālo riteņu materiālu izvēle un pieļaujamo mehānisko īpašību noteikšana; b) riteņu izmēru aprēķināšana atbilstoši saskares un lieces izturības nosacījumiem; c) pārnesumu projektēšana. Zobrati ir tipiski pārveidotāji, kuriem ir izstrādāti diezgan daudz saprātīgu dizaina optimālu variantu. Pārnesumu konstrukcijas sintēzes shēmu var attēlot kā trīs galveno strukturālo elementu kombināciju: gredzenu, centrmezglu un centrālo disku (5.9. Attēls). Pārnesumu forma un izmēri tiek noteikti atkarībā no zobu skaita, moduļa, vārpstas diametra, kā arī riteņu ražošanas materiāla un tehnoloģijas. Att. 5.8. Attēlo pārnesumu mehānismu paraugus. Riteņu izmēriem ieteicams lietot saskaņā ar GOST 13733-77 norādījumiem. Studenti, maģistranti, jaunie zinātnieki, kuri izmanto zināšanu bāzi savos pētījumos un darbā, jums būs ļoti pateicīgi. Iesūtīts vietnē http://www.allbest.ru/ Pārnesumi Ievads pārnesumkārbas apgrieztā pārvade Zinātnes un tehnoloģijas straujā attīstība noved pie jaunu materiālu rašanās, jauniem tehnoloģiskiem risinājumiem, kas ļauj radīt pilnīgi jaunus dizainus, bet pamatprincipiskie noteikumi paliek nemainīgi. XI gadsimtā īpaša uzmanība tika pievērsta mašīnbūves un gaisa kuģu būves nozarei, šajā sakarībā es vēlos runāt par vispārējas nozīmes elementiem, kas tiek izmantoti šajās nozarēs, proti, rīkiem. Kopsavilkumā tiek dota apgrozījuma definīcija, to klasifikācija, pārnesumu riteņu ģeometrisko parametru aprēķināšanas metode. Šajā rakstā ir aprakstīts arī pārnesumu pārsūtīšanas piešķiršana, norādīti mehānismu pārvades raksturlielumi. 1
.
Zoobchatoh riteni,
klasifikāciju Pārnesums, pārnesums - zvejas rīka galvenā daļa diska formā ar zobiem uz cilindriskas vai koniskas virsmas, kas acis ar cita pārnesuma zobiem. Mašīnbūvei ir ierasts izsaukt mazu pārnesumu ar mazāku zobu skaitu, pārnesumu riteņu, un lielu zobratu, ko sauc par pārnesumu. Tomēr bieži vien visus pārnesumu riteņus sauc par pārnesumiem. Att. 1. Pārnesumkārba Zobrati parasti tiek izmantoti kā ratiņi ar dažādiem zobu skaitļiem, lai pārveidotu griezes momentu un vārpstu apgriezienu skaitu ieejā un izvadā. Ritenis, kuram no ārpuses tiek piegādāts griezes moments, tiek saukts par braukšanas ierīci, un riteni, no kura tiek noņemts moments, vada. Ja piedziņas riteņa diametrs ir mazāks, tad piedziņas riteņa griezes moments palielinās, pateicoties proporcionālam rotācijas ātruma samazinājumam un otrādi. Atbilstoši pārnesumu skaitlim griezes momenta palielinājums radīs proporcionālu piedziņas mehānisma rotācijas ātruma samazinājumu, un to produkts, mehāniskā jauda, nemainīsies. Šī attiecība ir derīga tikai ideālam gadījumam, kurā netiek ņemti vērā berzes zudumi un citas reālas ierīcēm raksturīgas sekas. A) Šķērsvirziena zobu profils Riteņu zobu profilam parasti ir involēta sānu forma. Tomēr ir zobratu ar zobu profila apaļo formu (Novikova pārnesums ar vienu un divām zobratu līnijām) un cikloīdiem pārnesumiem. Turklāt ratchet mehānismos tiek izmantoti pārnesumu riteņi ar asimetriskiem zobu profiliem. Pārnesumu parametri: m - riteņa modulis. Iesaistīšanās modulis tiek saukts par lineāru daudzumu p reizēm mazāks apkārtmērs P vai pīķa attiecība starp jebkuru koncentrisku apļa apli ptas ir, modulis - diametrs vienā diametrā uz vienu zobu. Tumšiem un vieglajiem riteņiem ir vienāds modulis. Svarīgākais standartizētais parametrs tiek noteikts, izmantojot zobratu stipruma aprēķinu. Jo lielāks ir pārraides ātrums, jo lielāks ir moduļa vērtība. Visi ģeometriskie pārnesumkārbas parametri ir izteikti, izmantojot moduli: 1. Zobu modulis m=
=
.
2. Zobu augstums h
=
2,25m.
3. Zobu galvas augstums h=
m.
4. Zobu augstums h=
2,25m.
5. Sprauga apļa diametrs d
=
mz.
6. Apļa izvirzījumu diametrs d=
d+
2
h =
d+
2m=
m(z+
2). 7. Dobu apļa diametrs
d = d + 2
h = d + 2
m = m (
z + 2).
8. Radiālais attālums starp pārošanās gredzeniem ar=0,25t. 9. Centra attālums a=
.
10. Zobu piķis p= pm.
11. Zobu biezums S=
0,5p=
.
12. Dziļums l=
0,5p=
.
13. Krona pārnesumu platums (zoba garums) b?
(6…8).m 14. Rumbas diametrs d?
(1,6…2)
d.
15. Rumbas garums l=
1,5
d.
16. Loka biezums d
?
(2,5…4) m.
17. Profila leņķis, ieslēgšanās leņķis b =
b
=
20. 18. Piķis, sākotnējais diametrs d =
d
=
mz.
19. Galvenais diametrs.
d
=
d cos b Att. 2 Pārnesumu parametri Mašīnbūvē tiek pieņemtas dažas zobratu moduļa m vērtības, lai atvieglotu pārnesumu izgatavošanu un nomaiņu, kas ir veseli skaitļi vai skaitļi ar decimāldaļām: 0,5; 0,7; 1; 1,25; 1,5; 1,75; 2; 2,5; 3; 3,5; 4; 4,5; 5 un tā tālāk līdz 50. B) Zoba garenvirziena līnija Zobrati tiek klasificēti atkarībā no zoba garenvirziena līnijas formas: lāpstiņas, spirālveida pārnesumkārbas, chevron. B) Spur riteņi Spur riteņi - visizplatītākais pārnesumu veids. Zobi atrodas radiālās plaknēs, un abu pārnesumu zobu saskares līnija ir paralēla rotācijas asij. Šādā gadījumā abu pārnesumu asīm jābūt arī paralēli. Spur riteņiem ir viszemākās izmaksas, bet vienlaicīgi šādu riteņu ierobežojošais griezes moments ir zemāks par spirālveida un spirālveida pārnesumiem. C) spirālveida pārnesums Spirālveida riteņi ir uzlabota cilindriskā aprīkojuma versija. To zobi ir vērsti pret rotācijas asi un veido spirālveida formu. Priekšrocības: Šādu riteņu ieslēgšanās notiek vienmērīgāk nekā spārnu pārnesumiem un ar mazāku troksni; Kontaktpunkts ir palielināts, salīdzinot ar piespiedu pārnesumu, tāpēc arī pārnesuma pārnesuma pārsūtītais griezes moments ir lielāks. Spirālveida mehānisma darbības laikā rodas mehānisks spēks, kas vērsts pa asi, kas prasa izmantot vilces gultņus vārpstas montāžai; Zobu berzes laukuma palielināšana (kas izraisa papildu jaudas zudumu apkurei), ko kompensē speciālu smērvielu izmantošana. Kopumā spirālveida riteņi tiek izmantoti mehānismos, kas prasa lielu griezes momentu pārsūtīšanu lielos ātrumos vai ar nopietniem trokšņa ierobežojumiem. D) Chevron riteņi Šo riteņu zobi tiek izgatavoti burta "V" formā (vai arī tos iegūst, savienojot divus spirālveida pārnesumus ar zobu pretuzstādīšanu). Zobratus, kuru pamatā ir šādi rīki, parasti sauc par "chevron". Chevron riteņi atrisina aksiālo spēku problēmu. Šāda riteņa abu pusi aksiālie spēki tiek savstarpēji kompensēti, tāpēc nav nepieciešams uzstādīt vārpstas uz vilces gultņiem. Šādā gadījumā pārnesums ir pašvirzīts aksiālā virzienā, tādēļ pārnesumkārbās ar četrriteņu riteņiem viena no šahtām ir uzstādīta uz peldošiem balstiem (parasti uz gultņiem ar īsiem cilindriskiem rullīšiem). D) Pārnesumu riteņi ar iekšējo pārnesumu Stingri ierobežojot izmērus, planētu mehānismos, pārnesumu sūkņos ar iekšējo pārnesumu, tvertnes torņa piedziņā tiek izmantoti riteņi ar iekšpuses griezumu. Braukšanas un piedziņas riteņu rotācija notiek vienā virzienā. Šādā pārvades gadījumā ir mazāks berzes zudums, tas ir, lielāka efektivitāte. E) Sektoru riteņi Nozares ritenis ir jebkura veida parastā riteņa daļa. Šie riteņi tiek izmantoti gadījumos, kad saiti nav nepieciešams pagriezienam, un tāpēc jūs varat ietaupīt uz tā izmēriem. G) Riteņi ar apaļiem zobiem Pārsūtīšana uz riteņu pamata ar apaļiem zobiem ir vēl augstāka braukšanas spēja nekā spirālveida pārnesumiem - liela zobratu pārnesumkārba, augsta gludība un beztrokšņa darbība. Tomēr tie ir ierobežoti, piemērojot samazinātu, ar tādiem pašiem nosacījumiem, efektivitāti un darba resursiem, ka šādus riteņus ir daudz grūtāk ražot. Zobu līnija tajos ir aplis ar rādiusu, kas izvēlēts īpašām prasībām. Zobu saskares virsmas atrodas vienā punktā pie sakabes līnijas, kas atrodas paralēli riteņu asīm. 2. Hzvejas rīki, klasifikācija Zobrats ir mehānisms vai mehāniskās transmisijas mehānisma daļa, kas ietver pārnesumu riteņus. Zvejas rīku klasifikācija Zobu profila forma: Involute; Apkārtraksts (Novikova nodošana); Cikloksīds. Pēc zobu veida: Spiediet zobus; Spirālveida; Chevron; Līklīnijas; Magnētisks. Ar šahtu asu savstarpējo izvietojumu: Ar paralēlām asīm (cilindriskiem rīkiem ar taisniem, slīpiem un chevroniem zobiem); Ar krustojošām asīm - zobratu pārnesumiem; Ar pārklājošām asīm. Sākotnējo virsmu forma: Cilindrisks; Koniskā; Globoīds; Pēc riteņa ātruma: Lēna kustība; Vidējs ātrums; Motorlaivas. Saskaņā ar drošības pakāpi: Atvērt; Slēgts. Saskaņā ar riteņu relatīvo rotāciju un zobu atrašanās vietu: Iekšējais pārnesums (riteņu rotācija vienā virzienā); Ārējais zobrats (riteņu rotācija pretējā virzienā). 3. Involute un tās īpašības Lielākajai daļai tehnikā izmantoto pārnesumu ir pārnesumi ar involētu profilu. L. Eulers ierosināja involēto līkni zobu profila veidošanai. Tam ir ievērojamas priekšrocības salīdzinājumā ar citām šim nolūkam izmantotajām līknēm - tas atbilst galvenajam zobārstniecības likumam, nodrošina pārnesumu attiecības noturību, nejutīgs pret neprecizitātēm aksiālajā atstatumā (kas atvieglo montāžu), ir vienkāršākais un tehnoloģiski ražošanā, tas ir viegli standartizēts (tas ir īpaši svarīgi šādam parastajiem zvejas rīkiem, piemēram, pārnesumiem). Neaizskaramais ir taisnes līnijas punkts, kas ritina, neslīdot pa apli. Šo līniju sauc par ģenerējošo līniju, un apli, pa kuru tā ruļļojas, sauc par galveno apli (3.a attēls). Att. 3 (a, b). Invertātam ir šādas īpašības, kas tiek izmantotas zobārstniecības teorijā: 1) evolventa formu nosaka galvenā apļa rādiuss; 2) jebkura punkta normālā uz involēto ir pieskare galvenajam lokam. Normālā punkta pieskāriena punkts ar pamata apli ir šķīdinātāja izliekuma centrs attiecīgajā punktā; 3) viena un tā paša pamata apļa šķīdinātājs ir vienādos (viens no otra) līknes. Jebkura punkta atrašanās vietu involutā var nepārprotami raksturot ar tā apļa diametru, kurā tas atrodas, kā arī raksturīgos leņķus involētam: izvēršanas leņķi (apzīmēts ar n), profila leņķi (b), involēto leņķi - invb (3.b attēls). 1.b attēls parāda šos leņķus punktam Y, kas patvaļīgi izvēlēts uz involuta, tāpēc tiem ir atbilstošs indekss: Н Y - evolventa leņķis, kas attīstās līdz y punktam; B Y - profila leņķis punktā Y; Inv Y ir involēta leņķis punktā Y (diametrs dY). Tas nozīmē, ka indekss rāda, kurā aplī atrodas aplūkojamais evolūcijas punkts, tāpēc raksturīgie apļi izmanto iepriekš sniegtos rādītājus. Piemēram: b a1 ir apgrieztā profila leņķis, kas atrodas uz pirmā riteņa virsotņu perimetra; invb - involēts leņķis evolventa punktā, kas atrodas uz riteņa perimetra utt. 4. Nopārnesumu griešanas darbības Ir divas būtiski atšķirīgas griešanas metodes: 1) kopēšanas metode; 2) darbības metode. Pirmajā gadījumā pārnesumu dobums tiek slīpēts uz universālas frēzēšanas mašīnas ar formas disku vai pirkstu griezēju, kura profils atbilst dobuma profilam. Pēc tam apstrādājamo detaļu pagriež 360 ° / z leņķī un sagriež nākamajā sienā. Tā izmanto dalāmo galvu, un ir arī griezēju komplekti, kas paredzēti riteņu griešanai ar citu moduli un atšķirīgu zobu skaitu. Metode ir neproduktīva un tiek izmantota maza apjoma un individuālā ražošanā. Otru velmēšanas vai noapaļošanas metodi var veikt ar instrumenta sliedes palīdzību (ķemmi) pārnesumu griešanas mašīnā; dolbyak uz pārnesumu veidošanas mašīnas vai tārpu dzirnavām uz pārnesumu frēzēšanas mašīnas. Šī metode ir ļoti produktīva un tiek izmantota masveida un liela mēroga ražošanā. Tas pats instruments var samazināt riteņus ar atšķirīgu zobu skaitu. Griešana ar instrumenta sliedes palīdzību simulē plaukta un zobratu pārnesumu, kur zobu profils ir veidots kā instrumentu profila secīgo pozīciju aploksne, kuras sākotnējā kontūra leņķis ir b = 20? Saslēgšanu starp griezējinstrumentu un griezto riteni sauc par darbgaldu. Mašīnu darbarīkos sākotnējais aplis vienmēr sakrīt ar piķa apli. Visproduktīvākā no aplūkotajām metodēm ir rīku frēzēšana ar tārpu dzirnavām, kas ar apstrādājamo detaļu ir savienotas ar tārpu pārnesumu. Griežot ar dolbyak, tā pārvietošanās virzienā notiek vienlaicīgi. Faktiski, tas ir apstrādājamā materiāla ieslēgšana ar rīka pārnesumu riteni - rammer. Šī metode visbiežāk tiek izmantota iekšējo pārnesumu riteņu griešanai. Visas paredzētās metodes izmanto cilindrisko riteņu griešanai gan ar taisniem, gan slīpiem zobiem. 5. Zobu profila griešana.Pārņemšanas korekcija Griežot zobratu, ir iespēja griezt zobus, kas izpaužas kā zoba piķa biezuma samazināšanās. Tas noved pie zobu galvenā (evolventa) profila griešanas un samazina to lieces izturību. Zobu griešana notiek tad, kad aktīvā sasaistes līnija N H2 pārsniedz teorētisko sakabes līniju B, B2, jo jebkurš zoba profila punkts (pārnesums), kas atrodas ārpus šīs līnijas, neatbilst pamata zobratu teorijai (normāls N "N") , kas atrodas šādā profilā saskares punktā, neiziet cauri saspiešanas stabam.) Augšanas risks ir vairāk nekā mazāks ritenis, jo VuH2<В2Н. Lai noteiktu minimālo nobīdes koeficientu xmin un minimālo zobu skaitu, par kuriem nav novērota cenu samazināšana, var izmantot atkarību no zobu galvenā sānu profila ierobežojošā punkta L izliekuma rādiusa. Atgādiniet, ka punkts, kas atdala šķīdinātāju un sānu profila pārejas daļu, tiek saukts par robežu. Kā zināms, lai izveidotu involēta zoba galveno profilu, tiek izmantots šķīdinātājs, kura izliekuma rādiuss vienmēr atbilst nosacījumam p\u003e 0. Turklāt involāts būs ārpus galvenā apļa un tā izcelsmes vietā, kas sakrīt ar galveno apli, būs izliekuma rādiuss p = 0. Tas ir ierobežojošais gadījums, kad riteņa zobu profils var būt NN sakabes līnijā un kura izliekuma rādiuss ir p = 0. Dažos gadījumos neliels zobu atslābums ir diezgan pieņemams, tas tiek darīts, lai uzlabotu zobu saskares apstākļus sākumā (vai beigās). ) pārnesums. Zvejas rīku korekcija (no latīņu valodas. Corrigo - pareiza, uzlabota), metode, kas uzlabo zobu zobu formu. Griežot pārnesumus, ražošanas sliedes sākotnējā standarta kontūra tiek virzīta radiālā virzienā tā, lai tā piķa līnija nepieskaras riteņa piķis. Šādā gadījumā jūs varat izmantot parastu plaukta un zobratu pārnesumu griezējinstrumentu (ķemmi, tārpu frēzmašīnu utt.) Vai dolbyaki. Apstrādes vads mašīnbūves darbināšanas metodē (skat. Pārnesumu griešanu) ,
riteņu sagriešana ar vēlamo sākotnējās kontūras nobīdi. K. h. K. parādījās kā līdzeklis, kā novērst nevēlamu zobu stumbra griešanu riteņos ar nelielu zobu skaitu, jo rīks ir nepilnīgs. Mūsdienu K. h. tāpēc, ka tai ir vispārīgāka nozīme un tas ir praktiski izteikts tīšās sākotnējās kontūras pārvietošanā, kas ir viens no galvenajiem pārnesumu riteņu ģeometriskajiem parametriem. Novirze no riteņa centra var būt negatīva vai pozitīva. Ja zobu profils ir pozitīvs, tiek izmantotas evolūcijas zonas ar lieliem izliekuma rādiusiem, kas palielina zobu kontaktu izturību, kā arī palielina to lūzuma izturību. K. h. var izmantot, lai uzlabotu abu riteņu pārnesumu kvalitāti un riteņa pārnesumu ar sliedi. Piemērota nobīdes izvēle var samazināt zobu slīdēšanu viens pret otru, samazināt nodilumu, samazināt uzlīmēšanas risku un palielināt pārneses efektivitāti. K. h. ļauj mainīt centrālo attālumu pārnesumos, kas ļauj atrisināt vairākas svarīgas strukturālas problēmas. Piemēram, pārnesumkārbās, planētu mehānismus utt. Var novietot starp divām transmisijas vārpstām, kurās viens un tas pats ritenis saskaras ar riteņiem ar atšķirīgu zobu skaitu, vai arī remontējot nestandarta rīkus, tos var nomainīt ar standarta. Aprēķinot koriģēto saišu ģeometriju, izmantojiet nobīdes koeficientu x, kas ir vienāds ar sākotnējās kontūras pārvietojumu, kas dalīts ar pārnesumu moduli. Pēc iecelšanas x 1
par 1. un x 2
otrā riteņa gadījumā ir jāapsver ierobežojošie apstākļi: zoba kājas pazeminājuma trūkums vai ierobežojums; nav traucējumu, t.i. zobu profilu savstarpēja krustošanās riteņu relatīvās kustības laikā; iegūt pietiekamu pārklāšanās koeficientu, kas droši nodrošina nākamā zobu pāru iesaisti līdz brīdim, kad iepriekšējais ir iznācis no iesaistīšanās; nav zobu asināšanas, t.i. iegūt pietiekamu zobu biezumu augšpusē. PSRS ir izstrādājusi ērtu veidu, kā ņemt vērā šos nosacījumus, tā saukto. bloķējošas kontūras - līknes, kas izveidotas koordinātās x 1
un x 2
.
Šīs diagrammas atspoguļo norādītos ierobežojumus un veido slēgtu cilpu, kas nosaka pieļaujamo x 1 un 1 kombināciju zonu x 2
. Par katru riteņu zobu numuru kombināciju ( Z 1
un Z 2
) veidojiet bloķēšanas ķēdi. Ja nav īpašas prasības pārskaitījumam, x 1
un x 2
pieļaujamo vērtību zonā tās izvēlas saskaņā ar vispārējiem ieteikumiem, kuros ņemtas vērā visas saiknes īpašības (tā sauktās universālās sistēmas K. z. K.). Ja ir īpašas prasības attiecībā uz pārvietošanu (piemēram, augsts zobu stiprums lūzumam utt.) x 1
un x 2
izvēlēties no pilnīgākās šo prasību apmierināšanas (speciālās sistēmas K. z. k.). Secinājums Zobrati ir visracionālākais un visizplatītākais mehānisko pārnesumu veids. Tie tiek izmantoti, lai pārsūtītu jaudu - no nenozīmīgi maziem līdz desmitiem tūkstošu kW, lai pārvietotu apkārtmērus no gramiem līdz 10 Mn (1000mc) frakcijām. augsta efektivitāte (zaudējumi precīzi, labi ieeļļoti transmisijās 1-2%, īpaši izdevīgos apstākļos, 0,5%); augsta izturība un uzticamība; neslīdēšana; mazas kravas uz šahtām. Zvejas rīku trūkumi ietver troksni darbā un precīzas ražošanas nepieciešamību. Vienkāršākais pārnesumu pārnesums sastāv no diviem riteņiem ar zobiem, caur kuriem tie savstarpēji savienojas. Piedziņas mehānisma rotācija tiek pārvērsta piedziņas riteņa rotācijā, nospiežot pirmā zoba zobus otrā. Mazāks pārnesums ir pārnesums, jo lielāks ir ritenis. Atsauces 1. Ivanovs M.N. Mašīnas daļas: mācību grāmata augstākiem studentiem. tech. pētījumi. iestādēm. M.: Augstāks. Sc., 1991. - 383 lpp. 2. Guzenkov P.G. Mašīnas daļas. - M .: Augstākā skola, 1982. - 504 lpp. 3. Kuklin N.G., Kuklina G.S., Mašīnas daļas. - M .: Augstskola, 1984 - 310 c. 4. G.I. Roshchin, E.A. Samoilov, N.A. Alekseeva. Mašīnu daļas un dizaina pamati: pētījumi. universitātēm / ed. G.I. Roshchinn un E.A. Samoilov. - M .: Drofa, 2006. -415 lpp. Iesūtīts pakalpojumā Allbest.ru Zvejas rīku klasifikācija ekspluatācijas nolūkos. Pielaides sistēma piespiedu pārnesumiem. Pārnesumu un pārnesumu kontroles metodes un līdzekļi. Ierīces spārnu pārnesumu kontrolei, to pielietošanas metodes. abstrakts, pievienots 11/26/2009 Pārnesumu mehānismi, kuros kustība starp saitēm tiek pārraidīta pēc secīgas zobu piesaistes. Zvejas rīku klasifikācija. Pārvades pārnesumu teorijas elementi. Ģeometriskie aprēķini involētajiem stimulējošiem rīkiem. Pārnesumu dizains. prezentācija pievienota 2014. gada 2. aprīlī Pārnesumu veidi. Cilindrisko pārnesumu ārējo pārnesumu parametri. Zobu samazinājuma veidi. Pārnesumu aprēķināšanas kritēriji. Pārnesumu materiālu izvēle un termiskās apstrādes metodes. Pieļaujamais spriegums maksimālajās slodzēs. lekciju kurss, pievienots 04/15/2011 Cilindrisko spirālveida pārnesumu parametri. Pārnesumu dizains un materiāli, to izmērs un forma. Bevel zobrati un tā ģeometriskais aprēķins. Tārpu pārnesumu projektēšana un aprēķināšana. Tārpu pārnesumu galvenās priekšrocības un trūkumi. abstrakts, pievienots 2009. gada 1. janvārī Materiāli zobratu izgatavošanai, to dizains un tehnoloģiskās īpašības. Zobratu ķīmiskās karstās apstrādes būtība. Ražojot rīkus, radās kļūda. Cementēto rīku apstrādes tehnoloģiskais ceļš. abstrakts, pievienots 01/17/2012 Cilindrisko riteņu pārnesuma frēzēšanas princips ar tārpu frēzmašīnu. Zobu griešanas metodes un pamatmetodes. Rīku griešanas rīku griešanai. Stiprināšanas ierīces, pārnesumu frēzēšanas mašīnas un to galvenās tehniskās īpašības. termiņš, pievienots 01/14/2011 Prasības zobu rīkiem. Blanku termiskā apstrāde. Cementēto daļu kvalitātes kontrole. Pārnesumu deformācija termiskās apstrādes laikā. Kontrolierīču metodes un līdzekļi. Cementa stumšanas krāsns. dokuments, pievienots 01/10/2016 Zobratu klasifikācija pēc zobu profila formas, to veida, šahtu asu relatīvā stāvokļa. Pārnesumu galvenie elementi. Cilindrisko pārnesumu galveno ģeometrisko parametru aprēķins. Riteņa zobu augšdaļu diametra mērīšana. prezentācija pievienota 2015. gada 5. maijā Pārnesumu apstrādes metožu tehnoloģisko iespēju paplašināšana. Apstrādes metodes asmeņu rīks. Pārnesumu priekšrocības - parametru precizitāte, zobu darba virsmu kvalitāte un pārnesumu materiāla mehāniskās īpašības. termiņš, pievienots 23.02.2009 Zobratu konstrukcija, nodilums, remonts un nomaiņa. Ātruma remonta rīku metodes. Cilindriska, spirālveida, konusveida zobrats. Atvērtie un slēgtie pārnesumi, pārnesumkārbas pārnesumu smērviela. Ātrgaitas remonta metodes, nomainot. Pārnesumu vilciens mehānisms, kas sastāv no riteņiem ar zobiem, kas savstarpēji savienojas un pārraida rotācijas kustību, parasti pārveidojot leņķisko ātrumu un griezes momentus. Z. p, dalīts ar savstarpējo vienošanos par pārvietošanu ( rīsi 1
): ar paralēlām asīm - cilindriskas; ar krustojošām asīm - konusveida, kā arī reti izmanto cilindrisku un plakanu cilindru; ar pārklājošām asīm - zobu skrūve (tārps, hipoīds un skrūve). Īpašs zvaigznes plāksnes gadījums ir plaukts un zobratu pārnesums, kas rotējošo kustību pārvērš par translāciju vai otrādi. Lielākajā daļā iekārtu un mehānismu Z. p. Ar ārējo pārnesumu, t.i., ar pārnesumu riteņiem, kuriem ir ārējā virsma zobi, retāk ar iekšējo zobratu, kurā zobi tiek sagriezti uz viena riteņa iekšējās virsmas. Pārnesumu riteņi veic: ar tiešiem zobiem darbiem ar zemiem un vidējiem ātrumiem atvērtos pārnesumos un ātruma kastēs; ar slīpiem zobiem, kas paredzēti izmantošanai kritiskajos pārnesumos vidējā un lielā ātrumā (vairāk nekā 30% no visiem zobratu pārnesumiem); ar zobu zobiem, lai smagos mašīnās pārsūtītu lielus momentus un spēkus; ar apaļiem zobiem - visos kritiskajos konisko zobratu pārnesumos. Pārnesumu attiecība) kur w 1 , z 1 un w 2 , z 2 - leņķiskais ātrums un zobu skaits, attiecīgi, ātrgaitas un zema ātruma pārnesumi. Peldošo pārnesumu kārbu ar maināmu pārnesumu attiecību veic ar apļveida cilindriskiem riteņiem, kas veramajam elementam tiek piešķirti ar vienmērīgi mainīgu ātrumu pie kapteiņa pastāvīgā ātruma. Šāds Z. lpp. Pārnesumu pārnesums vienā pāru riteņu pārnesumkārbās parasti ir līdz 7, pārnesumkārbās līdz 4, mašīnu galdiem līdz 20 vai vairāk. Ķēdes ātrumi lielai precizitātei Z. n. - līdz 15 m / s spirālveida pārnesumiem - līdz 30. \\ t m / s ātrgaitas pārnesumos ātrums ir līdz 100 m / s un vairāk. Z. p. Vai racionālākais un visizplatītākais mehānisko transmisiju veids. Viņi tiek izmantoti, lai nodotu varu - no nenozīmīgiem līdz desmitiem tūkstošu kW, pārvietot rajona spēkus no gramiem līdz 10. \\ t Mn (1000 mc).
Z. P galvenās priekšrocības: ievērojami mazāki izmēri nekā citiem pārnesumiem; augsta efektivitāte (zaudējumi precīzi, labi ieeļļoti transmisijās 1-2%, īpaši izdevīgos apstākļos, 0,5%); augsta izturība un uzticamība; neslīdēšana; mazas kravas uz šahtām. Algu nosacījumu trūkumi ietver troksni darbā un precīzas ražošanas nepieciešamību. Gears ir tā sauktajā. zobratu pārnesums, kura galvenā kinemātiskā īpašība ir momentānās pārnesumu attiecības ar zobu pastāvīgu kontaktu. Šādā gadījumā vispārējam normālam (savienojuma līnijai) ar pārnesumu riteņu profiliem jebkurā to kontakta punktā jāiet cauri sasaistes polimam ( rīsi 2
). Cilindriskajos rīkos saspiešanas stabs ir kontaktpunkts starp pārnesumu riteņu sākotnējiem apļiem, t.i., apļiem, kas velk viens otru bez slīdēšanas. Sākotnējo loku diametrs d 1 un d 2 var noteikt pēc attiecībām:
kur A - centrālais attālums (attālums starp riteņu asīm). Šo nosacījumu apmierina daudzas līknes, jo īpaši evolventi, kas ir visizdevīgākie zobu profilēšanai, ņemot vērā darbības un tehnoloģisko īpašību kombināciju, tāpēc Involute gearing izmantoja mašīnbūvē. Riteņus ar apgrieztu profilu var izgriezt ar vienu instrumentu, neatkarīgi no zobu skaita un tā, ka katrs involētais ritenis var saskarties ar riteņiem, kuriem ir kāds zobu skaits. Instrumentu zobu profils var būt vienkāršs, ērts ražošanai un kontrolei. Involute iesaistīšanās ir maz jutīga pret centra attāluma novirzēm. Zobu profila saskare notiek piesaistes līnijas punktos, kas šķērso savienojuma polu attiecībā pret galvenajiem lokiem ar diametriem d 01 = d 1 cos α un d 02 = d 1 cos α, kur α ir sasaistes leņķis. Invertētā un cita pārnesumkārbas moduļa galvenais dimensijas parametrs m, vienāds ar pārnesuma diametra attiecību d d zobu skaits z. Par nekoriģētiem involētiem rīkiem (sk. \\ T Zobratu korekcijaa) sākotnējie un piķa apļi sakrīt: d 1 = d d1 = mz 1 un d 2 = d d2 = mz 2 . Profils ts. ģenerējošais statīvs, veidojot pārnesumu, ir iezīmēts gar galveno sliežu sākotnējo kontūru ( rīsi 3
), ko iegūst, palielinot normāla involēta zvejas rīka zobu skaitu līdz bezgalībai. Reiki, kas ražo zobus, ir palielinājies h = (h ” + h ”)
lai radītu radiālo atstarpi acī ( c o m),
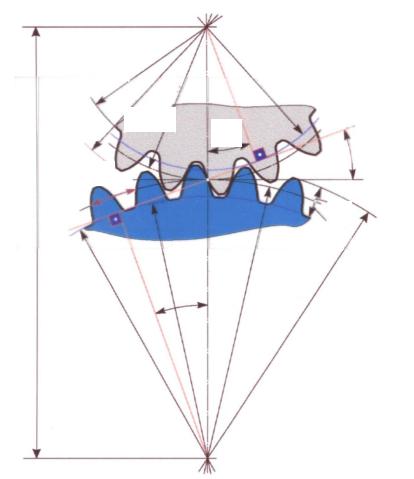
biezums gar piķa apli s, izliekuma rādiuss r i,pārnesumu piķis t, zobrata leņķis α d. Spirālveida pārnesumos sākotnējais kontūrs tiek pieņemts sekcijā, kas ir normāla zoba līnijai. Koniskā Z. p. rīsi 4
) sākotnējos cilindrus aizstāj ar sākotnējiem konusiem 1
un 2
. Zobu profili tiek uzskatīti par zobu sānu virsmu krustošanās līnijām ar papildu konusiem. 3
un 4,
koaksiālie sākotnējie, bet ar ģeneratoriem, kas ir perpendikulāri sākotnējo konusu ģeneratoriem. Moduli, sākuma un piķa lokus mēra uz ārējā papildu konusa. Lai nodrošinātu zobu profilēšanu, plaknē tiek izvietoti papildu konusi. 5
un 6.
Iniciatīvu iesaistīšanos var uzlabot, labojot. Papildus nejaušai pārnesumkārbai, pulksteņu mehānismiem un dažām citām ierīcēm tiek izmantots cikliskais zobrats, kas darbojas ar mazākiem berzes zudumiem un ļauj izmantot zobratus ar nelielu zobu skaitu, bet tam nav noteikta involēta pārnesumu priekšrocība. Smagās mašīnās kopā ar involētiem rīkiem tiek izmantoti apļveida riteņi ( rīsi 5
), kas ierosināts 50. gados. 20 collas. M.Likikovs. Novikova ieslēgšanās riteņu riteņu profili ir raksturoti ar lokiem. Viena pārnesuma (parasti mazā) izliektie zobi ir saskarē ar otras puses ieliektajiem zobiem. Sākotnējais pieskāriens (bez slodzes) notiek vienā punktā. Pārnesumā Novikov riteņi ir spirālveida. Zobu kontaktpunkti nepārvietojas gar zobu augstumu, bet tikai ass virzienā, t.i. savienojuma līnija ir paralēla riteņu asīm. Šādu saldēšanas sistēmu priekšrocības ir šādas: samazināts saskares spriegums, labvēlīgi apstākļi eļļas ķīļa veidošanai, iespēja izmantot riteņus ar nelielu zobu skaitu un līdz ar to arī lielas pārnesumu attiecības. Novikova pārnesumu izturība pēc kontakta izturības kritērija ir ievērojami augstāka par involētajiem. Lai precīzi darbotos, ir nepieciešama to precizitāte. Attiecībā uz H. lpp. Sniedza 12 precizitātes pakāpes, kas izvēlētas atkarībā no pārraides darba mērķa un nosacījumiem. Galvenie darbības traucējumu iemesli ir: zobu lūzums, zobu virsmas slāņu nogurums, abrazīvais nodilums, zobu iesprūšana (novērota, kad eļļas plēve tiek iznīcināta no augstiem spiedieniem vai augstām temperatūrām). Galvenie rīku materiāli ir sakausēti tēraudi, kas pakļauti termiskai vai ķīmiskai termiskajai apstrādei: virsmas sacietēšana, galvenokārt augstfrekvences strāvas, beršana, cementēšana, nitro-cementēšana, nitrēšana, cianidācija. Z. p. No tērauda, kas uzlabota ar termisko apstrādi pirms zobu griešanas, ražota, ja nav stingru prasību attiecībā uz to izmēriem, visbiežāk mazos un individuālos produktos. Īpašas prasības trokšņainai un zemai slodzei, viens no pārnesumiem ir izgatavots no plastmasas (PCB, kaprolons, laminēta plastmasa, poliformaldehīds), un savienojums ir izgatavots no tērauda. H. lpp. Uzskaita lieces spriegumu stiprumu bīstamajā daļā pie zobu pamatnes un kontakta spriegumiem pie piespraudes. Rezerves daļas tiek izmantotas vienkāršu viena posma pārnesumu veidā un dažādu kombināciju veidā, kas ir iebūvēti vairākās automašīnās vai izgatavoti kā atsevišķas vienības. Z. pp tiek plaši izmantots, lai samazinātu leņķisko ātrumu un palielinātu griezes momentu Ātrumkārba ahh Pārnesumkārbas parasti veic atsevišķos apvalkos, kas atbilst attiecīgi viena, divu un trīs posmu pārnesumu skaitam, attiecīgi 1.6-6.3; 8-40; 45-200. Visizplatītākās divpakāpju pārnesumkārbas (aptuveni 95%). Lai iegūtu dažādas izejas vārpstas rotācijas frekvences pie pastāvīga piedziņas dzinēja ātruma, tiek izmantotas pārnesumkārbas (sk Pārnesumu kārba). Pārnesumu mehānismu iespējas tiek paplašinātas, izmantojot planētu pārnesumus (skat Planētu pārnesums),
kas tiek izmantoti kā pārnesumkārbas un diferenciālmehānismi (skat. \\ t Diferenciālais mehānisms). Planētu zvaigžņu pārnesumu mazos izmērus un masu nosaka slodzes sadalījums starp vairākiem pārnesumiem (satelītiem), kas veic planētu kustību un iekšējo zobratu izmantošanu, kam ir lielāka celtspēja. Pārejot no vienkārša pārnesuma uz planētu, tiek sasniegts 1,5-5 reizes mazāks masas samazinājums. Vismazākajiem relatīvajiem izmēriem ir viļņu pārraides (skat Viļņu pārraide),
nodrošinot lielas slodzes ar augstu kinemātisko precizitāti un stingrību. Lit. Kudryavtsev V.N., Gears, M. - L., 1957; Reshetov, N. N., Machine Parts, M., 1963; Časovnikovs, LD, Pārvietojumi, ko veic ar mīklu, M., 1969; Mašīnas daļas. Handbook, ed. N. Acherkana, 3. sēj., M., 1969. D. N. Reshetov. Att. 2. Invertējošu profilu veidošanās: NN - vispārējs normāls; P - pārnesumu stabs; α ir sasaistes leņķis; ω 1 un ω 2 - leņķa ātrumi; 1 un 2 pārnesumu riteņi. Lielā padomju enciklopēdija. - M.: Padomju enciklopēdija.
1969-1978
.
Pārnesumu vilciens - Gears. Zobrati: riteņi; izmantotie spirālveida rīki; chevronā; g konusveida. ĀTRUMA TRANSMISIJA, mehānisms rotācijas kustības pārnešanai starp šahtām un mainīgajam rotācijas ātrumam. Gears var iebūvēt mašīnā, ... ... Ilustrēta enciklopēdiska vārdnīca Nosūtīšana, izmantojot zobratu. Viens no vecākajiem veidiem, kā pārslēgt rotāciju starp šahtām, kas mūsdienās tiek plaši izmantots, jo īpaši gadījumos, kad ir nepieciešamas pastāvīgas rotācijas frekvences. Pārnesumi ... ... Collier's enciklopēdija pārnesumu vilciens - pārnesumkārba Trīsvirzienu mehānisms, kurā abas kustīgās daļas ir pārnesumu riteņi, kas veido rotācijas vai translācijas pāru ar fiksētu savienojumu. [GOST 16530 83] Pārraides priekšmeti Vispārīgi termini Termini, kas saistīti ar ... ... Tehniskā tulkotāja rokasgrāmata Trīs saikņu mehānisms, kurā 2 mobilās saites ir pārnesumu riteņi (vai ritenis un statīvs, tārps), kas veido rotācijas vai translācijas pāru ar fiksētu savienojumu (korpuss, statīvs). Ir cilindriski rīki ... Liela enciklopēdiska vārdnīca ĀTRUMA TRANSMISIJA - trīspakāpju mehānisms, kurā divas mobilās saites ir pārnesumu riteņi (vai ritenis un statīvs, tārps), kas veido rotācijas vai translācijas pāru ar fiksētu savienojumu (korpuss, statne). Ir cilindriski cilindri, ... ... Lielā Politehniskā enciklopēdija Ātrumkārba Ātrumkārba ir mehānisms vai mehāniskās pārnesumkārbas daļa, kas ietver pārnesumus. Mērķis: rotācijas kustības pārvietošana starp šahtām, kam var būt paralēla ... Wikipedia Mehānisms rotācijas kustības pārnešanai starp šahtām un rotācijas ātruma maiņa, kas sastāv no pārnesumu riteņiem (vai nu no ritenīša un statīva), vai no tārpa un tārpa riteņa. Vienkāršākā viena posma pārnesumu plaukta saites ... Enciklopēdiska vārdnīca Griešanās mehānisms. kustība starp šahtām un rotācijas ātruma izmaiņām, kas sastāv no pārnesumiem (vai nu ar reduktoru un līstēm), vai no tārpa un tārpa riteņa. Vienkāršākā viena posma 3. lpp. Sastāv no plaukta, vadošā un ... ... Liels enciklopēdisks politehniskais vārdnīca pārnesumu vilciens - krumpliaratinė perdava statusas T sritis automatika atitikmenys: angl. pārnesumu vilciens; pārnesumu pārnesums; pārnesot vok. Zahnradübersetzung, f; Zahnradgetriebe, n; Zahnradtrieb, m rus. pārnesumu vilciens, f pranc. commande par engrenages, f ryšiai: ... ... Automatikos terminų žodynas pārnesumu vilciens - pārnesumu. pārnesumkārba. pārnesumu. pārnesums. pārnesumu pāris. tārps. tārps. hipoidu transmisija. globoīdu pārnešana. planētu pārnesumu. spirālveida pārnesums (# pārnesums). chevron (# ritenis). pārnesumu griešanas mašīna (# mašīna). pārnesumu veidošana. Krievu valodas ideoloģiskā vārdnīca

![]()
Sūtīt savu labo darbu zināšanu bāzē ir vienkāršs. Izmantojiet tālāk norādīto veidlapu.
Līdzīgi dokumenti
![]()

Skatiet, kas ir "pārnesums" citās vārdnīcās: