සිලින්ඩරාකාර පණුවා ආම්පන්නයේ මොඩියුලය ගණනය කිරීම. Worm Gear
මෙහෙයුම් හා විෂය පථයේ මූලධර්මය. Worm ආම්පන්නය (11.19 ඡේදය) යනු පයිප්ප අක්ෂ අක්ෂයැම් සහිත ය. ඡේදනය වීමේ කෝණය සාමාන්යයෙන් 90 °. පණුවන්ගේ චලනය මඟින් ඉස්කුරුප්පු යුගල මූලධර්මය අනුව හෝ චලනය වන තලයෙහි මූලධර්මය අනුව පරිවර්තනය කරනු ලැබේ. පණුවා ආම්පන්නයක්, පණුවන් (ක්රි.ව. 11.20) සහ ඉරට්ටේ (පොලි 11.22) යන පොම්පයක් ලෙස හැඳින්වේ. පණුවා එහි අක්ෂය වටා භ්රමණය වන විට එය සිලින්ඩරාකාර පෘෂ්ඨය ඔස්සේ ගමන් කරයි. පණුවන් සහ පණෝ රෝදය සම්පූර්ණ දත් වලින් විශේෂිත මෙවලමක් ආධාරයෙන් දත් කැපීමෙන් සිදු කෙරේ. ප්ලාස්ටික් ගියර් එකේ ආම්පන්නයේම මෙන්, බෙදීමේ සිලින්ඩරවල විෂ්කම්භය (පයුර 11.19): d 1 - පණුවාගේ බෙදීෙම් විෂ්කම්භය, d 2 - පෝඩ් රෝදයේ අන්තරාල විෂ්කම්භය. අන්තරාලයේ විචල්යයේ සංඥාව වන්නේ, මැදිහත්වීමේ ධ්රැවය ලෙසය.
රූපය 11.19 - පණුවාගේ ආම්පන්නය.
පණුවන් ගියර වල වාසි:
1. එක් අදියරක විශාල ගියර් අනුපාතය ලබා ගැනීමේ හැකියාව (i= 8 – 200).
2. නිහඬ සහ නිහඬ මෙහෙයුමක්.
3. සංචලතාව (කුඩා ප්රමාණය).
4. තිරිංග (පණුවන් රෝදය සිට පණුවා දක්වා මාරු වීමට නොහැකිවීම).
5. ඩම්පින් ගුණයන් යන්ත්ර කම්පන අඩු කරයි.
පණුවන්ගේ අවාසි:
1. වැඩ කිරීමේ කලාපයේ සැලකිය යුතු ඝර්ෂණයක්.
2. තාප මාරු කිරීම.
3. අඩු කාර්යක්ෂමතාව.
සීමිත බලයක් සහිත උපාංග (සාමාන්යයෙන් 50 kW දක්වා) උපාංග වල පණුවන් යොදා ගනී.
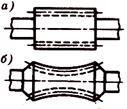
Figure 11.20 - වර්ම්ස්.
දර්පණ කපන යන්ත, කල්පවත්නා ඇඹරුම් යන්ත, ගැඹුරු ෙරොයින්ට් යන්ත, ඔසවා තැබීෙම් සහ එන්ජින් වින්ච්, ෙබොක්ස්, බර ඉසිලීෙම් යාන්තණ, ඊතල සහ වාහන සහ දුම්රිය දොඹකර, බැකෝ යන්ත්ර, විදුලි ෙගොඩනැගිලි, ට්ර්රෝලි බස සහ ෙවනත් යන්ත සඳහා භාජනය කිරීම සහ පෝෂණය කිරීම සඳහා භාවිතා කරන ෙරෝද ආවරණ භාවිතා කරනු ලැෙබ්.
වර්ම්ස්. නූල් කපන ලද මතුපිට හැඩය අනුව සිලින්ඩරාකාර (පයුර 11.20, අ) සහ ග්ලෝබොයිඩ් (රූපය 11.20, ආ) පණුවන් ඇත. නූල් පැතිකඩයේ හැඩය සරළ (රූපය 11.21, a) සහ වක්රය (ආකෘතිය 11.21, b) හි ආංශික කොටසක පැතිකඩ සහිතය. වඩාත් බහුලව භාවිතා සිලින්ඩරාකාර පණුවන්. අන්තිම කොටසෙහි අක්ෂීය කොටසේ සෘජු පැතිකඩ සහිත පණුවන් තුල, කැටයම් කර ඇත්තේ Archimedesan සර්පිලාකාරයයි. එබැවින් ආකිමිඩීස් ටේරෙස්සයිල් හිස්කබලයකට සමානයි.
අවසානයේ පණුවන්ට අවසාන කොටසෙහි අනිවාර්ය පැතිකඩක් ඇති අතර, එම නිසා දත් සංඛ්යාව ද පණුවන්ගේ ගණනට සමාන වේ. පණුවාගේ ප්රධාන ජ්යාමිතික පරාමිතීන් වන්නේ: = 20 ° පැතිකඩ පැතිකඩ කෝණය (archimedes පණුවා සහ ද්රවීකරණයේ සාමාන්ය කොටස තුල කුරුල්ලෙකු කපා සමග); p - පණුවාගේ දත් හා රෝදයේ අන්තරාල චක්රයන්ට අනුරූප වන රෝදය ද; t =අක්ෂීය මොඩියුලය; z 1. -පණුවාගේ පැමිණීම් ගණන; - පණුවාගේ විචල්ය සංගුණකය; - හිස්කබලේ උන්නතා කෝණය ![]() ; ඩී 1 =qm -අන්තරාල විෂ්කම්භය (ඊළඟට පහත රූප සටහන 11.21 බලන්න); d a = d 1 + 2m- ප්රක්ෂේපණවල විෂ්කම්භය; d fl = d 1 - 2,4එම් - කුහරයක රවුම් විෂ්කම්භය; b 1 - පණුවාගේ කැපුම්වල දිග, එය රෝදයේ වැඩිම දත් ගණනක් එකවර භාවිතා කළ යුතු ය. z 1 = 1 ... 2 b 1\u003e (11 + 0.06 z 2) එම් දී z 1 = 4 b 1 ≥(12.5 + 0.09 z 2) එම්].
; ඩී 1 =qm -අන්තරාල විෂ්කම්භය (ඊළඟට පහත රූප සටහන 11.21 බලන්න); d a = d 1 + 2m- ප්රක්ෂේපණවල විෂ්කම්භය; d fl = d 1 - 2,4එම් - කුහරයක රවුම් විෂ්කම්භය; b 1 - පණුවාගේ කැපුම්වල දිග, එය රෝදයේ වැඩිම දත් ගණනක් එකවර භාවිතා කළ යුතු ය. z 1 = 1 ... 2 b 1\u003e (11 + 0.06 z 2) එම් දී z 1 = 4 b 1 ≥(12.5 + 0.09 z 2) එම්].

Figure 11.21 - පණුවාගේ නූල පැතිකඩ සහ ප්රධාන ජ්යාමිතික පරාමිතීන් වල හැඩය
තේරුම එම් සහ q ප්රමිතිකරණය.
වොම් රෝද. Offset without cut (Figure 11.22):
d 2= z 2 එම් - ප්රධාන කොටසෙහි තාර කවය විෂ්කම්භය;
d a 2 = d 2 + 2 m - ප්රධාන කොටසෙහි ප්රක්ෂේපණ විෂ්කම්භය;
ඩී f 2 = d 2 - 2,4එම් - ප්රධාන කොටසෙහි කුහරයක රවුම් විෂ්කම්භය;
w= 0.5 (q + z 2) m - මධ්ය දුරක්.
11.3 වගුවෙහි ප්රමාණය b 2 -පවර් රෝදය පළල සහ d aM 2 - විශාලතම රෝද විෂ්කම්භය රෝද මගින් කෝටරයේ පරිවාරක කෝණය 2d = 100 °:
වගුව 11.3
සටහනකපන ලද දත් රහිත ත්රිත්වයේ දත් ගණන:
නිෂ්පාදනයේ නිරවද්යතාවය. පණිව් Gear සඳහා, ප්රමිතිය සඳහා නිරවද්යතාවයෙන් අංශක 12 ක් ලබා දෙයි. ඉහළ තාර්කික නිරවද්යතාවයක් අවශ්ය වන Gear සඳහා, III, IV, V සහ VI ශ්රේණියේ නිරවද්යතා අගයයන් නිර්දේශ කරන්න. බල සම්ෙපේෂණ සඳහා V, VI, VII, VIII සහ IX හි නිරවද්යතාව සඳහා නිර්දේශ කරනු ලැබේ.
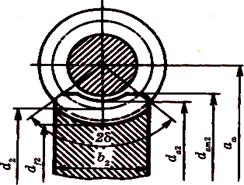
Figure 11.22 - පෝඩ් රෝදයේ ප්රධාන ජ්යාමිතික පරාමිතීන්
Gear අනුපාතය මෙම පොම්ප ආම්පන්නය, ආම්පන්නයට පටහැනිව, පර්යන්ත වේගයන් වේ v 1සහ v 2නොගැලපේ (බලන්න 11.23 බලන්න). ඒවා 90 ° ක කෝණයක දිශාවකින් යුක්ත වේ. ඒවායේ ප්රමාණය වෙනස් වේ. සාපේක්ෂ චලිතය සිලින්ඩරවල රේඛා සිලින්ඩර සහ බ්ලොග් ගියර් ද ධාවනය නොකෙරේ. පණුවන්ගේ එක් වාරයක් සමඟ, රෝදය වටා දත් ගණනක් ආවරණය කරන කෝණයක් කෝර් කෝණයට සමාන වේ. මෙම රෝදය පණුවාගේ වේගයේ සම්පූර්ණ හැරීමක් සිදු වනු ඇත, i.e.
ඒ නිසා z 11, 2 හෝ 4 ට සමාන විය හැකි අතර (එකේ නඩත්තුව නොතිබිය හැකිය), පසුව එක් පණුවන් යුගලක් විශාල gear හුවමාරු අනුපාතය ලබා ගත හැකිය.
අල්ලා ගැනීම. චලනය වන විට, ඉස්කුරුප්පු යුගලක් මෙන්, රෝදයේ දත් ඔස්සේ පණුවාගේ ස්ලයිඩ් ස්ලයිඩ් ස්පේන්. ස්ලයිඩින් ෙව්ගය sපණුවාගේ ඉස්කුරුප්පු රේඛාවට ටැන්ජන්ට් ය. සාපේක්ෂ වේගයක් ලෙස එය පරාවර්ථක වේගයන් වන පණුවා සහ රෝද අතර නිරපේක්ෂ වේගයන් අතර ජ්යාමිතික වෙනසකට සමාන වේ. වීසහ v 2(11.19 හා 11.23 බලන්න); හෝ, එසේමය
![]()
![]()

Fig. 11.23. ස්පරිං ෙව්ගය නිර්ණය කිරීෙම් කමෙව්දය
පණුවා හීලික්ස් කෝණය උෂ්ණත්වය කොහෙද? ඒ නිසා< 30°, то в червячной передаче v 2අඩුය v 1a sපණුවන්ගේ වේගවත් ස්ලිප් හි අඩු කාර්යක්ෂමතාව, වැඩි වීමක් සහ අත්පත් කර ගැනීමේ ප්රවණතාවයක් ඇති කරයි.
වර්ම් ආම්පන්නය කාර්යක්ෂමතාව සූත්රය (11.48) විසින් තීරණය කරනු ලැබේ. මෙම වෙනසට ඇත්තේ දැල්වල අලාභයන්ගේ අර්ථ දැක්වීම පමණි. ඉස්කුරුප්පු පැටියා KP.D. ප්රධාන පණුවන් සහිත සූත්රයක් සූත්රය අනුව තීරණය වේ.
කාර්යක්ෂමතාව වැඩිවීමත් සමඟ ඝර්ෂණය නැවැත්වීමේ සංඛ්යාව වැඩි වීම සහ ඝර්ෂණ හෝ ඝට්ටනයේ සංගුණකය අඩු වීමත් සමඟ කාර්යක්ෂමතාව වැඩි වේ. රෝදය නායකත්වය දෙන්නේ නම්, බලවේගයන්ගේ දිශාව වෙනස් වන අතර ඉන් පසුව අපට ලැබේ
≤, 3 = 0 විට, ප්රතිවිරුද්ධ දිශාවට චලනය කිරීම (රෝදය සිට පණුවා දක්වා) නොහැකි ය. අපි ස්වයං-තිරිංග පණුවන් යුගලයක් ලබා ගනිමු.
ඝර්ෂණය පිළිබඳ සංගුණකය වේගයෙන් වේගයෙන් රඳා පවතින බව අත්හදා බැලීම් කරන ලදී. වැඩිවෙමින් පවතී sපහළට යනවා. මෙය හේතු කොට ගෙනය sඅර්ධ තරල ඝර්ෂණයෙන් ද්රව ඝර්ෂණයෙන් සංක්රමණය වීමට තුඩු දෙයි. ඝර්ෂණ සංගුණකයෙහි අගයන් ද ඝර්ෂණය මතුපිට සහ ලිහිසි තෙල්වල ගුණාත්මකභාවය මත රඳා පවතී.
මුලික ගණනය කිරීම් සඳහා, සහ සහ s11.4 වගුව මඟින් සාමාන්ය අගයන් මඟින් කාර්යක්ෂමතාව තෝරා ගත හැකිය.
ව ව 11.4
ගණනය කිරීමේ පැහැදිලි කිරීමේ කාර්යයේ ප්රමාණය තීරණය කිරීමෙන් පසුව.
හමුදාවට බැඳීම. පණුවා ආම්පන්නයේ (පය 11.24 බලන්න): පණුවාගේ චුම්බක බලය F t 1පණුවාගේ අක්ෂීය බලයට සමාන වේ F a 2,
රෝද පරිමාණය F ටී 2 පණුවාගේ අක්ෂීය බලයට සමාන වේ F a 1
රේඩියල් බලයක්
(11.71)
සාමාන්ය ශක්තියයි
![]() (11.72)
(11.72)
බලයේ අක්ෂීය තලයේ F tzසහ F rසංඝටක වේ F n = F n cos(අක්ෂීය තලයේ දී සාමාන්ය බලයෙන් ප්රක්ෂේපණය). T 1 -පණුවා මත මොහොත T 2- රෝදය මත මොහොත:
T 2 = T(11.73)
මූලික කාර්යසාධනය සහ ගණනය කිරීම් නිර්ණායකය. පණුවන්ගේ ආතති සහ පීඩන සම්බන්ධ පීඩන වලින් වර්ණක ආවරණ ගණනය කරනු ලැබේ. තවත් ඇඳුම් සහ ජෑම් පවතී. මෙය ඉහළ ස්පින්ජ් වේගයන් හා ස්පර්ශක රේඛාවට සාපේක්ෂව නොගැලපේ. අල්ලා ගැනීම වැලැක්වීම සඳහා විශේෂ ඝර්ෂණ ද්රව්ය ඝන ද්රව්ය භාවිතා කරනු ලැබේ: පණුවා - වානේ, රෝද - ලෝකඩ හෝ යකඩ යකඩ.

Fig. 11.24. පණුවන්ගේ ක්රියාකලාපය
ආතතිය තීව්රතාවය සම්බන්ධතා ආතතිය මත රඳා පවතී. ප්රධාන ගණනය කිරීම් ස්පර්ශක පීඩන මගින් සිදු කෙරේ. විලෝපන පීඩන ගණනය කිරීම පරීක්ෂණයකි.
ස්පර්ශ ආතතීන් ගණනය කිරීම. සමීකරණය
 (11.74)
(11.74)
පණුවන් ගියර් සඳහා ගණනය කිරීම සඳහා භාවිතා කෙරේ. Archimedewan පණුවන් සඳහා, අක්ෂීය කොටසෙහි පණුවන්ගේ හැරීම් වල රාමුව ρ 1 =. ඉන්පසු සූත්රය (11.8) සමීකරණය (11.20) අපට ලබා ගත හැක
හෙලිකොප්ටි ගියර් සමග සමානයි
ස්පර්ශක රේඛාවේ මුළු දිග කොපමණද (11.22 බලන්න); α = 1,8 ... 2,2 - පණවුඩ් රෝදයේ මැද තලයේ දී අතිරික්ත අගයක් ඇති බව. ≈ 0.75 යනු පරිපූරකයේ සම්පූර්ණ චාපය දෙපසම සබඳතාව රඳවනු නොලැබීම නිසා සම්බන්ධක රේඛාවේ දිග අඩු කිරීම යන සංගුණකය වේ. සූත්රය (11.74) ආදේශ කිරීමෙන් පසු අපි ලබා ගනිමු
අක්රමිකතා, වර්ගීකරණය, මැෂින් වර්ග
වර්ණ මාරු: සැලසුම්, වාසි සහ ලක්ෂණ
පණුවා ආම්පන්නයකින් සමන්විත වන අතර එය හිස් කබලක් ලෙස හැඳින්වේ. සම්ෙපේෂන පතුවල අක්ෂයන්හි ඡේදනය වන විට, ඡේදනය වීමේ කෝණය සාමාන්යයෙන් 90 0.
රූපය 1
හෙලික්සීය රෝදයට වෙනස්ව, පණුවා රෝදය සමතල සහිත හැඩයක් ඇති අතර, එය පණුවාගේ නිශ්චලතාවයට දායක වන අතර, ඒ අනුව, ස්පර්ශක රේඛාවේ දිග වැඩි වීමකි. පණුවාගේ නූල තනි හෝ බහු (2, 4) විය හැක.
වාසි:
විශාල ගියර් අනුපාතය ලබා ගැනීමේ හැකියාව;
නිහඬ සහ නිහඬ ක්රියාවක්;
ස්වයං-තිරිංග ලබාගැනීමේ හැකියාව (ආදාන වෙනස් කිරීමේදී).
අවාසි:
සාපේක්ෂව අඩු කාර්යක්ෂමතාව (තනි නූල් පණුවා සමග 0.72, ද්වි-නූල්-0.8 සමග, සිව් නූල් සහිත - 0.9);
රෝදය සඳහා මිල අධික ඝණ අපහරණ ද්රව්ය භාවිතා කිරීමට ඇති අවශ්යතාව;
ඇඳුම් හා තාපය වැඩි වීම.
විවිධාකාර නිර්ණායක අනුව වර්ණක උපයෝගී කර ගනී.
1) පණුවා ආකාරයෙන්:
සිලින්ඩරාකාර පණුවා සහිත (Figure 2a);
ග්ෙලෝබයිඩ් පණුවා සමග (රූපය 2b);
B) ග්ලෝබයිඩ් පණුවා සමග
රූපය 2
2) පණුවාගේ දඟරයේ හැඩයේ හැඩය:
Archimedian Worm (GOST 19036-81 අනුව -ZA) අනුව. අක්ෂීය කොටසෙහි, දත් නියැදි ආකෘතියේ අවසාන කොටසෙහි - ආර් - ඉිමීඩියානු සර්පිලාකාර හැඩයේ (tracezium) හැඩයක් ඇත (රූපය 3a);
සාමාන්ය කොටසක දී දඟරයක් සහිත සරල රේඛා කොළයක් සහිත ව්යාකූල පණු සහිතය (Figure 3b);
දත් කුහරයක් සහිත හෙලිකොප්ටර් යනාදිය හා විශාල කෝණයකින් යුත් නැඹුරුවකින් යුත් ((ZJ)) ප්රතිවිරුද්ධ පණුවා (ZJ), (මුහුණතේ කොටසෙහි, දත් ද්රවයට දෝශයක් ඇත (Figure 3c).
රූපය 3
ඉහළ ස්පින්ජි වේගයන් නිසා පණුවන් යුගලයේ ප්රති-ඝර්ෂණ ලක්ෂණ, ආෙල්පන ප්රතිරෝධය සහ තදබදය අඩු ප්රවණතාවයක් තිබිය යුතුය.
පණුවන් කාබන් ෙහෝ මිශ ෙලෝහ වලින් සාදා ඇත. පණුවන්ගේ හැරීම් තදින් අධික තෙතමනයකට ලක් වන ජෝඩු පසුව උපරිම ඇඹරීමට ඇති හැකියාවයි.
වර්ම් රෝද බොහෝ සෙයින් යකඩවලින් තැනූ ලෝකඩයෙන් සෑදී ඇත.
OF10-1, ONF වැනි ටින් ලෝකඩය හොඳම ද්රව්යය ලෙස සැලකේ. නමුත් ඒවා මිල අධික හා අඩුවෙන් පවතී. ඉහළ වේගයන් V s = 5 ... 25 m / s දී භාවිතා කරන්න. නිදසුනක් ලෙස තනුක නොවන ලෝකඩ, උදාහරණයක් ලෙස ඇලුමීනියම්-ferruginous වර්ගය Br.AZh9-4, යාන්ත්රික ලක්ෂණයන් වැඩි දියුණු කර ඇතත්, ප්රති-අල්ලා ගැනීමේ ගුණ අඩු කර ඇත. V සඳහා භාවිතා කරනු ලැබේ<5m/c. Чугун применяют при V s <2м/с, преимущественно в ручных приводах.
ප්ලාස්ටික් වලදී සම්මත පැතිකඩ කෝණය 20 ° ලෙස උපකල්පනය කරනු ලැබේ: සම්මත කොටසෙහි අක්ෂ්යාංශයේ අග්රිමීඩියානු පණුවන් සඳහා, සම්මත ග්රහකය සඳහා, සාමාන්ය කොටස තුල, සිදුරු සහිත හෙලිකොප්ටරයක් සහිත සාමාන්ය කොටසක දී සාමාන්ය කොටසක දී. අක්ෂයට සමාන්තරව මනින ලද, පණුවන්ගේ යාබද වක්රාකාර දෙකෙහි පැති වල එකිනෙකට සමාන පරතරය, ගණිත පියවර ලෙස හඳුන්වනු ලැබේ. P / π අනුපාතය මොඩියුල ලෙස හැඳින්වේ. මොඩියුලය (m) යනු සම්මත පරාමිතියක් වේ: පණුවා සඳහා, එය අක්ෂීයව, පෝඩ් රෝද සඳහා ඉදිරිපස-මුහුණ සඳහා.
දෙසට ගමන් කරන සම්බන්ධතා දෙකකින් සමන්විත වන අතර එය පණුවෙකු සහ කට්ටලයක් වන අතර අක්ෂ්යාංශ ඡේදනය වන අක්ෂය අතර භ්රමණ චලිතය සම්ප්රේෂණය කිරීම හා පරිවර්තනය කිරීම සඳහා නිර්මාණය කර ඇත. Worm යනු සම්බන්ධකයක් ලෙස හැඳින්වේ, එහි බාහිර මතුපිටට ඉස්කුරුප්පුවක් හැඩයක් ඇත. පණවුඩ් රෝදය යනු පණුවා සමග සම්බන්ධ වන අක්ෂි දත් සහිත ගියර් රෝදයකි.
GOST 18498-73 අනුව: පණුවන් සහ පණුවන් වර්ග
1. පණුවා බෙදීමේ මතුපිට පෙනුම මගින් පෙනේ
සිලින්ඩරාකාර පණිව් ගියර් - නෞකාවේ රෝදය සහ රෝදය සිලින්ඩරාකාර තාර සහ මුල් මතුපිට ඇත;
Globoid worm gears - බෙදුම්කරු සහ පණුවන්ගේ ආරම්භක පෘෂ්ඨය මගින් පණුවාගේ අක්ෂය වටා ද්විත්ව පණුවා රඳවන වෙන් කිරීම හෝ ආරම්භක මතුපිටක ආප්ත කොටස මඟින් භ්රමණය කරනු ලැබේ.
2. පණුවාගේ දඟරයක සෛද්ධාන්තික මුහුණත පැතිකඩක් පෙනේ
Archimedes worm (ZA) - පැතිකඩ Archimedesan සර්පිලාකාරය ඔස්සේ සාදා ඇත;
ආක්රමණික පණුවන් (ZI) - පැතිකඩක් චක්රයක් තුලට සිදු වේ.
ප්රෝටෝට් පණුවා (ZN) - දිගු දිදුලන දිශාව ඔස්සේ පැතිකඩය සිදු කෙරේ.
(14.4 බලන්න)
සිලින්ඩරාකාර පෝරට් ගියර් මිශ්ර කිරීම:
සිලින්ඩරාකාර පද්දතියේ ආම්පන්න ආම්පන්න ජ්යාමිතිය ගණනය කිරීම GOST 19650 - 74 මගින් පාලනය වේ. පණුවාගේ ප්රධාන පරාමිතීන් අතර සම්බන්ධය - ආරම්භක සිලින්ඩරයේ d w1 හි විෂ්කම්භය, හීලික්ස් pz1 සහ එහි කෝණ කෝණයෙහි ආනතයේ පරිමාව - පහත දැක්වෙන සම්බන්ධතාවය මගින් තහවුරු වේ.
(14.5 බලන්න)
![]()
හිලීස් ගමන් මග අතර සම්බන්ධතාවය pz1 සහ තල කිහිපයක් ඉස්කුරුප්පු කිරීම p1
![]()
ජ්යාමිතිය ගණනය කිරීම:
අමු දත්ත
එම් අක්ෂීය මොඩියුලය;
q - පණුවාගේ විචල්ය සංගුණකය;
z1 - පණුවාගේ හැරීම් සංඛ්යාව;
අ මධ්ය දුර ප්රමාණය;
x - පණුවාගේ විස්ථාපනයේ සංගුණකය;
උගියර් අනුපාතය.
මෙවලම් පරාමිතීන්
h * = (h * w + c * 1) - දඟරයේ උස අනුපාතය;
h * a හිස් උස අනුපාතය;
* - සැලසුම් කළ ඝණකම;
r * f - සංක්රාන්ති වක්රයේ පරිපථයේ අරයයේ සංගුණකය;
c * 1,2 = 0.25 ... 0.5 ; s = = 0.75 h ; r * f = 0.3 ... 0.45
(14.6 පි.)

ජ්යාමිතික පරාමිති ගණනය කිරීම:
1. රෝද දත් අංකයක්
2. ඕෆ්සෙට් ෆැක්ටරය (මධ්යස්ථ දුර ප්රමාණය සකසා ඇත)
මධ්යස්ථ දුර (සන්සන්දක සාධකය නිශ්චිතව දක්වා ඇත)
3. උච්ච තරම
![]()
4. සෙ.මී.
![]()
5. Pitch කෝණය පණුවන් දඟරයක්
![]()
6. ආරම්භක කෝණය පණුවන් දඟරයක්
7. නැඟීම ප්රධාන කෝණය පණුවා දඟර (ZI පණුවන් සඳහා පමණි)
සහ පණුවාගේ ප්රධාන විෂ්කම්භය
![]()
8. උස පණුවන් දඟරයක්
9. හිස් උස පණුවන් දඟරයක්
10. විල්ටෙක්ස් විෂ්කම්භය
පණුවාගේ හැරීම්
මැද මුහුදේ තටුවේ රත් වූ රෝදයේ දත්
11. හරස් ටැංකි
පණුවා රෝදය
12. විශාලතම විෂ්කම්භය පණුවා රෝදය
13. ක්රවුන් පළල පණුවා රෝදය
14. කැපුම් කොටසෙහි දිග පණුවා (x = 0 සහිත)
ජ්යාමිතික තත්ත්ව දර්ශක ආම්පන්න:
1. පෝඩ් රෝදය දත් කපා හැරීම අවශ්ය නොවේ
(කුඩා උන්නතාංශ කෝණ වලදී, පෝඩ් රෝද ආක්රමණයේ පණුවා සිට චලනය වෙත මාරු කල නොහැකිය)
අවාසි :
ඉහළ දිලීර වේගයක් දත් රේඛාව ඔස්සේ ඉහළට නැඹුරු වේ (පණුවන්ගේ ගියර් ආම්පන්න ආම්පන්න සඳහා විශේෂ ලිහිසි සහ ද්රව්ය අවශ්ය වේ), අඩු කාර්යක්ෂමතාව සහ ඉහළ තාපය විසුරුවා හැරීම.
Worm Gears - චාලක මාරු කිරීම සඳහා නිර්මාණය කරන ලද චාලක යුගලයකි. එය පණුවා සහ රෝදය සමන්විත වේ.
අනිවාර්ය කොන්දේසිය - ඒවා අතර යමෙකු නිවැරදි කෝණයක් සාදයි. එහි පහත දැක්වෙන වාසි ඇත.
- වැඩි ආම්පන්න අනුපාත (300 ට වැඩි);
- ඍජු සම්බන්ධතා සහ ශබ්දය;
- විදුලි සම්ප්රේෂණය 60 kW කි.
චාලක යුගලයේ අඩුපාඩු එහි කොටසෙහි ඉතා අඩු කාර්යක්ෂමතාවයක් (0.7-0.92) වන අතර දැඩි තාපය සහ දිගුකාලීනව ක්රියාකාරීත්වය ක්ෂණිකව අසමත් වේ. ඒ සමගම රෝදය සෑදූ ලෝකඩ පිරිවැය ඉතා ඉහළ ය.
අපගේ සමාගම කුඩා හා විශාල කාණ්ඩවල සාම්පල හා අවසන් සාම්පල අනුව ස්ථාන මාරු සිදු කරයි.