Կենտրոնի հեռավորության հանդերձանքի հաշվարկը: Մեքենաների հաշվարկը
Երկրաչափական պարամետրեր:Ուղղահայաց շարժակների դեպքում ատամները որոշակի անկյունում գտնվում են բաժանարար գլան գեներատորի նկատմամբ (Նկար 11.9): Անիվ ձիները մնում են զուգահեռ: Ճեղքված ատամները կտրելու համար օգտագործեք նույն աղբյուրի գործիքի գործիքը, ինչպես ուղիղ կտրելը: Հետեւաբար, նորմալ հատվածում շեղատված ատամի կոնտուրը n - ն համընկնում է ուղիղ ատամի կոնտուրի հետ: Այս բաժնի մոդուլը ստանդարտ է

Նկար 11.9 - Սխալ սխեմա գլանաձեւ հանդերձում (երկրաչափական չափերը)
Վերջնական բաժնում t-tճկուն ատամի պարամետրերը տարբերվում են կախված տեսանկյունից p:
Տարածաշրջանի սկիպիդար.
Շրջանի մոդուլ
Pitch տրամագիծը ![]() .
.
Ինդեքս n վերագրվում է նորմալ բաժնում պարունակվող ցուցանիշներին եւ ցուցանիշին tորոնք վերագրվում են վերջնական բաժնում պարամետրերին:
Նորմալից դեպի ատամի հատվածը ձեւավորում է կիսաթանկարժեք ժապավեն ունեցող էլիպս
c = rեւ e =որտեղ Ատամները գտնվում են էլիպսի փոքր առանցքի վրա գտնվող ներգրավման մեջ, քանի որ երկրորդ անիվը հեռավորության վրա է .
Էլլիպսի կորի ճառագայթումը փոքր առանցքի վրա (տես երկրաչափություն) ![]() .
.

Նկար 11.10 - ուղղահայաց շարժակների համարժեք պարամետրերի որոշման սխեմա
Դրա համաձայն, նորմալ հատվածում շեղված ատամի ձեւը հավասար է խթանիչ հանդերձին, որի տրամագիծը
եւ ատամների քանակը
![]()
Բարձրացնել համարժեք պարամետրերը (դեւ z v)աճող անկյունը մեծացնում է ուղղահայաց շարժակների ուժը:
Բազմակի զուգավորում եւ ներգրավվածության հարթություն. Ի տարբերություն ուղղակի, շողոքորթ ատամները անմիջապես ներգրավված չեն ողջ երկարությամբ, բայց աստիճանաբար: Ներգրավվածությունը հեռու է կետերից: 1 միավորներով 2 (Նկար 11.9):
Սխտորային դաշտում շփման գծերի տեղադրությունը ներկայացված է Նկար 11.11-ում, ա, բ (համեմատել Նկար 11.3-ի հետ `խթանման հանդերձանքով): Շարժվումիս շփման գծերը շարժվում են նետաձգության դաշտում, սլաքի ուղղությամբ: Դիտարկվող ժամանակահատվածում կա երեք զույգ ատամներ: 1, 2 եւ 3. զույգը 2 զբաղվում է ատամների երկարությամբ, եւ զույգը 1 եւ 3 – միայն մասամբ: Այնուհետեւ զույգը դուրս է գալիս ներգրավվածությունից եւ շարժվում է 3 «դիրքով, եւ ներկայումս երկու զույգ կա: 2" եւ 1’. Ի տարբերություն արագաշարժ հանդերձանքի, ուղղահայաց հանդերձում չկա միակողմանի զտիչ գոտի: Զսպման շարժակների մեջ երկու ատամներից մեկի կամ մեկից երկուսի բեռը անմիջապես փոխանցվում է:

Նկար 11.11 - Multi-pair զառիվայր խթանման սարքավորում
Սա ուղեկցվում է ցնցումների եւ աղմուկի: Վիրտուալ շարժակների մեջ ատամները աստիճանաբար բեռնվում են, երբ նրանք մտնում են հանդերձանքի դաշտը, եւ առնվազն երկու զույգ ատամը մշտապես գործում է: Դրսեւորվող հանդերձանքի հարթությունը զգալիորեն նվազեցնում է աղմուկը եւ դինամիկ բեռը:
Helical gears կարող են աշխատել, առանց խանգարելու ներգրավվածության նույնիսկ face-to-face հարաբերակցության< 1, если обеспечено осевое перекрытие b w\u003e;(Նկար 11.11, բ) . Վերաբերմունք
![]() (11.22)
(11.22)
կոչվում է առանցքային համընկնումի գործակից: Խորհուրդ է տրվում վերցնել ≥ 1.1: Վիրտուալ ներգրավվածության մեջ բեռը բաշխվում է շփման գծերի ողջ երկարությամբ: 1, 2, 3. Հատուկ ծանրաբեռնվածությունը նվազում է շփման գծերի ընդհանուր երկարության աճով: Նկար 11.11-ից կարելի է սահմանել, որ, երբ մի ամբողջ թիվ հավասար է,
եւ չի փոխվում, երբ շարժվում է, քանի որ տողը նվազում է 3 միշտ համապատասխանում է գծի հավասար աճին 1. 11.23 բանաձեւից ակնհայտ է, որ այն աճում է աճով, ինչը շահավետ է: Այնուամենայնիվ, աճի դեպքում, սահուն աճի մեջ գտնվող առանցքային բեռները (տես ստորեւ), հետեւաբար խորհուրդ է տրվում տանել = 8-20 °:
Մակերեւութային ատամի կողային մակերեսին շփման գիծը գտնվում է որոշակի անկյունում (Նկար 11.12, ա): Անկյունը մեծանում է: Բեռնվածքը շփման գծի երկայնքով տարածված չէ: Առավելագույնը ատամի միջին գծում է, քանի որ միջինում, երբ ատամները ունեն առավելագույն ընդհանուր կոշտություն:
Երբ ատամը շարժվում է ներգրավման հարթությունում, շփման գիծը շարժվում է դեպի ուղղությամբ 1 դեպի 3 (Նկար 11.12, բ), իսկ դիրքորոշումը կարող է վտանգավոր լինել ուժի համար 1, որտեղ ատամը խախտում է անկյունը: Հոգնածության ճեղք է ձեւավորվում ատամի արմատին սթրեսային կոնցենտրացիայի տեղում, այնուհետեւ տարածվում է որոշակի անկյան տակ: Կտրուկ շեղման հավանականությունը արտացոլվում է ատամների ուժով ճկման սթրեսների եւ բեռի կոնցենտրացիան q- ուժի կոնտակտային սթրեսների միջոցով:

Գծապատկեր 11.12 - Շփման գծի կողքի մակերեւույթի վրա
Մեսշեն ուժերը. Վիրտուալ հանդերձում (նկար 11.13) նորմալ ուժ F nներկայացրեց երեք բաղադրիչ.

Նկար 11.13 - Խելացի պտուտակային դազգահի ներգրավվածության ուժեր
թաղային ուժը
առանցքային ուժ, (11.24)
ռադիացիոն ուժը ![]() .
.
Այնուհետեւ նորմալ ուժ ![]() .
.
Ցանցում գտնվող առանցքային ուժը հետագայում բեռնվածքի լիսեռի առանցքակալների վրա է, որը խելացի շարժակների անբավարարություն է:
Կոնտակտային սթրեսների համար ատամների հաշվարկը:Վիրտուալ շարժակների համար հատուկ բեռը, հաշվի առնելով բանաձեւերը (11.23) եւ (11.24)
![]() , (11.25)
, (11.25)
որտեղ K nα- ն միաժամանակյա ատամների զուգակցող զուգահեռ բեռի գործակիցն է:
Բնութագրում արժեքը փոխարինելը (11.8) d w 1մեկ ղեկի համարժեք d vl[տես բանաձեւը (11.20)], մենք ստանում ենք
![]() . (11.26)
. (11.26)
Համեմատելով հարաբերությունները բանաձեւի (1.4) սպուրի համար (բանաձեւեր 11.6 եւ 11.8) եւ ուղղահայաց շարժակների, մենք որոշում ենք

 . (11.27)
. (11.27)
Նշեք
 , (11.28)
, (11.28)
որտեղ Z Hβ - կոնտակտային սթրեսների վրա ուղղահայաց շարժակների ուժեղացման գործակիցը: Օգտագործելով բանաձեւը (11.9), մենք ստանում ենք ուղղահայաց շարժակների համար
 . (11.29)
. (11.29)
Վիրտուալ շարժակների մեջ, ատամների կտրման ժամանակ սխալների պատճառով, երկուսի զտիչը կարող է մասամբ կոտրվել: Սա հանգեցնում է նրան, որ մի զույգ ատամը բեռնված է ավելի շատ, քան մյուսը, ուստի գործակիցը K Hαհաշվի է առնում անհավասար բեռը: Միեւնույն ժամանակ առանձնացեք K Hαկոնտակտային լարման հաշվարկների եւ K F αճկման սթրեսների հաշվարկների համար: Գործակիցների արժեքները ընտրվում են ըստ հղումների գրքերի, որոնք կախված են սարքավորումների շրջագծային արագությունից եւ արտադրության ճշգրտության աստիճանից: Դիզայնի հաշվարկում այս տեղեկությունները հայտնի չեն, հետեւաբար արժեքը Z h(11.29) բանաձեւում որոշվում է մոտավորապես: Միջին արժեքները հաշվի առնելով = 12 °, = 1.5 եւ KN α = 1, 1, մենք ստանում ենք Z nβ= 0.85, իսկ դիզայնի հաշվարկի ձեւակերպումները (11.10) եւ (11.12) `ուղղահայաց շարժիչի թվային գործակիցները բազմապատկելով`
Հաշվարկել գլանաձեւ ուղղահայաց փոխանցման միակողմանի փոխանցման տուփ, որը կազմված է առանձին միավորի ձեւով, պայմանով, որ փոխանցման միջոցով փոխանցվող իշխանությունը P 1 = 10 կՎտանկյունային արագության հանդերձում ω 1 = 78 ռադ / վ (n = 1 750 ppm -1), անիվի արագություն ω 2 = 39 ռադ / վ (n = 375 ppm -1): Փոխանցման բեռը մշտական է, բայց փոխանցման տուփի մեկնարկի ընթացքում այն համամասնականորեն ավելանում է 1.6 անգամ: Փոխանցման ծառայության ժամկետը 30000 ժամ:
Որոշումը:
Փոխանցման համար տրամադրվում ենք ներգրավված հատվածներ, առանց տեղահանման: Մենք կհամակարգենք հիմնական պարամետրերը ԳՕՍՏ 2185-66 (ST SEV 229-75) հետ: Նյութը երկուսն էլ շարժիչի անիվները - 40X պոլիէթիլենային խառնուրդով եւ հաստատակամություն `կարծրություն HRC48. Առանցքի շարժակների համար մենք կստանանք ճշգրտության 7-րդ աստիճանը, ըստ հարթության նորմերի, համաձայն ԳՕՍՏ 1643-81 (ST SEV 641-77):
Դրսեւորման հարաբերակցությունը, որը այս հանդերձանքի համար հավասար է հանդերձումային հարաբերակցությանը uըստ բանաձեւի
u = 2 համապատասխանում է ԳՕՍՏ 2185-66 եւ ST SEV 221-75:
Հաշվարկել փոխանցման ատամները շփման ուժի եւ ճկման վրա: Շփման ուժի վրա ատամների հաշվարկից մենք հաշվարկում ենք փոխանցման կենտրոնի հեռավորությունը ա ըստ բանաձեւի 
Որոշեք այս բանաձեւում ընդգրկված մեծության արժեքները:
Սահմանեք հաղորդման հանքերը շարժակազմի վրա եւ վերցրեք η = 0.98. Անիվի փոխանցված իշխանությունը, ըստ բանաձեւի
P 2 = 9.8 կՎտ;
տորթը փոխանցվում է անիվի, ըստ բանաձեւի 
T 2 = 251 N × մ.
Վերցրեք գործակիցը (տես հանդերձափոխադրիչները) ψ ba = 0.25. Այնուհետեւ բանաձեւից
 Նկար. 1
Նկար. 1
Սկսած (նկար 1) մենք հաստատում ենք դա HRC48 = HB460. Ժամանակացույցով Վ (Նկար 2) գործակիցը K β ≈1; կվերցնեն K Hβ = 1.
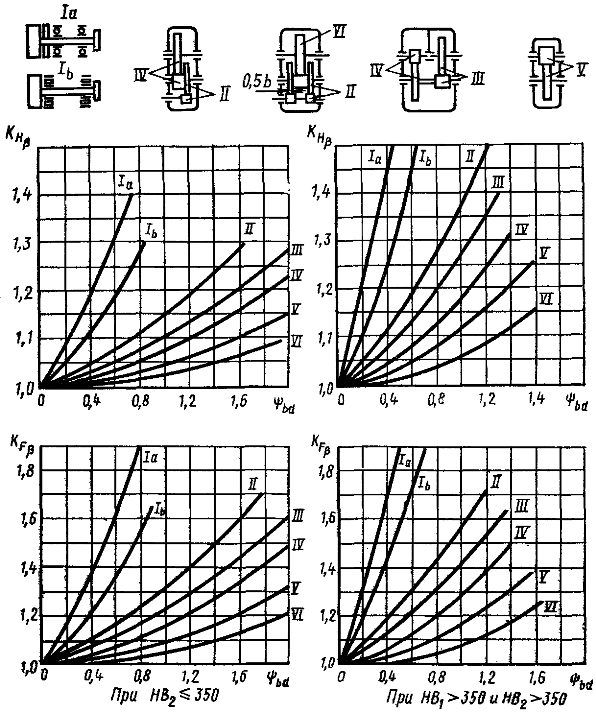 Նկար. 2
Նկար. 2
Թույլատրելի կոնտակտային լարումը [σ H] եկեք հաշվարկենք բանաձեւով, նախապես որոշելով այն մեծության արժեքները, որոնք ընդգրկված են այս բանաձեւում: Սեղանի համապատասխան ատամների մակերեսների շփման շղթայի սահմանը:
σ H lim b = 1014 ՄՊա.
Վերցրեք անվտանգության սահմանը ի H = 1,1Բ) գործակիցը Z R = 0.95Բ) գործակիցը Z v = 1. Շեշտական ցիկլերի հիմնական թիվը ժամանակացույցի վրա (նկար 1) համար HB460 N H0 = 70 × 10 6. Ստորերկրյա ցիկլերի համարժեք թիվը բանաձեւով
 Նկար. 3
Նկար. 3
Հարգանք N HE / N H0 = 675 * 10 6 / (70 * 10 6) = 9.6 գրաֆիկի վրա (նկար 4) համապատասխանում է ամրության գործակիցին K HL = 0,9.
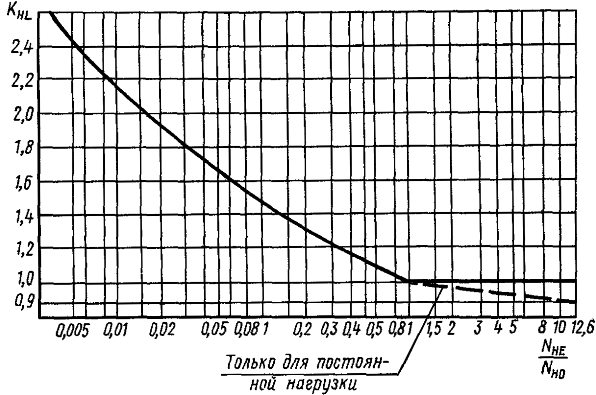 Նկար. 4
Նկար. 4
Թույլատրելի կոնտակտային լարումը ըստ բանաձեւի
[σ H] = 790 ՄՊա.
Ուղղահայաց փոխանցման հեռավորությունը բանաձեւով 
ա w = 88 մմ.
Համաձայն ԳՕՍՏ 2185-66-ի (ST SEV 229-75) ընդունում ա w = 100 մմ. Pitch կենտրոնի հեռավորությունը ա = w = 100 մմ. Ատամների մոդուլը:
m = 2 մմորը համապատասխանում է ԳՕՍՏ 9563-60 (ST SEV 310-76):
Ատամների անկյուն β = 8 ° 0'4 " (cos 8 ° 0'4 "= 0.99): Սխալ ատամների եւ անիվի բանաձեւի գումարը 
Տրված ատամների քանակը ըստ բանաձեւի 
Անիվի ատամների թիվը
Ստուգեք բանաձեւը 
ատամների աշխատանքային մակերեսները կոնտակտային ուժի համար, կարճաժամկետ բեռի վրա ատամների առավելագույն կոնտակտային սթրեսում: Դա անել, ըստ բանաձեւի 
որոշել կոնտակտային կոնտակտային լարումը σ Հպատճառված հաշվարկային պահից T 1 եւ թույլատրելի առավելագույն կոնտակտային լարումը [σ H] max. Գործակիցը Z h ըստ բանաձեւի 
(β b = β եւ α tw = α / cos β)
Գործակիցը Z M = 275 N ½ / մմ. Մեխանիկական համընկնման հարաբերակցությունը բանաձեւով
(1.88-3.2 (1 / z_1 + 1 / Z_2)) ()) cos beta = delim ([] (1.88-3.2 (1/33 + 1/66 )) ()) 0.99 = 1.72">!}
Գործակիցը Z ε ըստ բանաձեւի 
Ժամանակացույցի համաձայն (Նկար 5, ա) գործակիցը K Hα = l, 05Բ) գործակիցը K ββ = l (վերը նշված) աղյուսակում: գործակիցը K Hv = l.
 Նկար. 5
Նկար. 5
Ըստ բանաձեւի հաշվարկված կոնտակտային լարումը 
Պողպատե 40X պողպատե սոսինձով եւ հալեցման համար, ըստ ԳՕՍՏ 4543-71, բերքատվություն σ T = 700 ՄՊա. Թերությունների համար թույլատրելի առավելագույն կոնտակտային լարումը
Քանի որ կարճաժամկետ փոխանցման ծանրաբեռնվածությունը 1,4 անգամ մեծ է, քան անվանական, ապա բանաձեւից
Դա նշանակում է, որ կարճաժամկետ ծանրաբեռնվածության դեպքում ատամները շփման դիմացկունություն ունեն:

Նրբաթիթեղի եւ անիվի նյութը նույնն է, բայց բազմանալների ատամների հաստությունը պակաս է անիվի ատամներից, հետեւաբար, մենք հաշվարկում ենք ճկումային ատամները ատամնավոր ատամների համար, որոնք պակաս դիմացկուն են, քան թեքում են ղեկի ատամները: Նախեւառաջ մենք որոշում ենք բանաձեւի քանակի արժեքները:
Torque փոխանցված է հանդերձում 
Ուղղորդված տեստերի համարժեք թիվը ըստ բանաձեւի 
Ժամանակացույցի վրա ատամների այս թիվը (նկար 6) համապատասխանում է ատամների ատամների ձեւավորման գործոնին Y F = 3.7. Գործակիցը Y ε = 1. Գործակիցը Y β
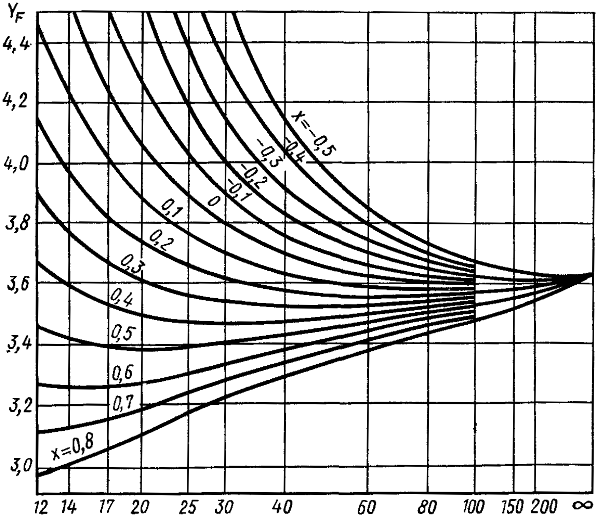 Նկար. 6
Նկար. 6
Տարբերակ d 1 եւ նախնական d w1 փոխանցման տրամագիծը 
Շրջանի հաշվարկային դրույքաչափը 
Այս արագության համար v
գործակիցների արժեքները K Hα եւ K Hv ճիշտ է ստացվել:
Ժամանակացույցի համաձայն (Նկար 5, բ) գործակիցը K Fα = 1.05. Հետ HB460 եւ ψ bd = 0.375 ժամանակացույցով Վ (Նկար 2) գործակիցը K Fβ ≈1Բ) կվերցնեն K Fβ = 1. Աղյուսակի համաձայն: դինամիկ բեռի գործոնը K Fv = 1.02.
Սարքավորման ատամների համար հաշվարկեք թույլատրելի ճկման սթրեսը [σ F] ըստ բանաձեւի 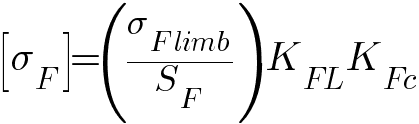
Մենք առաջին հերթին որոշում ենք այդ բանաձեւի քանակների արժեքները: Աղյուսակի համաձայն: ատամների տոկունության սահմանը σ F lim b = 580 ՄՊա. Վերցրեք անվտանգության սահմանը ի F = 1,7. Շեշտական ցիկլերի համարժեք քանակ N F0 = 4 × 10 -6ըստ սթրեսի ցիկլերի բազային թիվը
Այսպիսով, ինչպես N FE = 135 × 10 7\u003e N F0 = 4 × 10 6, տեւականության գործակիցը K EL = 1. Գործակիցը K Fc = 1.
Կռում սթրեսը [σ F] տրիկոտաժային ատամների համար `ըստ բանաձեւի
Կատարեք տեստերի ատամների թեստային հաշվարկ, ըստ բանաձեւի 

Հետեւաբար, փոխանցման ճկման ատամները բավականին ուժեղ են:
Ստուգեք ատամները պլաստիկ դեֆորմացիայի կամ փխրուն քացախի համար, երբ ճկում է, երբ գործում է ատամների կարճաժամկետ ծանրաբեռնվածությունը բանաձեւով: Գնահատված սթրեսը ատամների ճկման վրա, հաշվարկված պահից առաջ T 1, σ F = 280 ՄՊա. Թերությունների ճկման թույլատրելի առավելագույն շեշտը
որտեղ σ B = 950 ՄՊա - առաձգական ուժը պողպատի 40X- ի համար, զանգվածային ջերմաստիճանի եւ հալման հետ (ԳՕՍՏ 4543-71): Քանի որ կարճաժամկետ փոխանցման ծանրաբեռնվածությունը 1.6 անգամ ավելի է, քան անվանականը, ապա ըստ բանաձեւի
Հետեւաբար, կարճաժամկետ ծանրաբեռնվածությամբ, ճկումային ատամները բավականին ուժեղ են:
Որոշեք ատամների չափը: Համաձայն ԳՕՍՏ 13755-81 (ST SEV 308-76), ատամների ղեկավարների բարձրության հարաբերակցությունը h * a = 1 եւ ճառագայթային մաքրման հարաբերակցությունը c * = 0.25.
Ատամի գլուխների բարձրությունը ըստ բանաձեւի 
Ատամի ոտքերի բարձրությունը ըստ բանաձեւի
Տղերի բարձրությունը բանաձեւով
Pitch տրամագիծը դգագաթների տրամագիծը դ ա եւ խոռոչների տրամագիծը d f ըստ բանաձեւերի.
հանդերձանքի համար
դ 1 = 66,67 մմ (հաշվարկվում է ավելի վաղ);
անիվի համար 
Օղակաձեւ հանդերձանքի աշխատանքային լայնությունը ըստ բանաձեւի
Ներածություն ............... .. ......................................... ................2
1. Կինեմատիկական սխեմաների վերլուծություն ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... 2
2. Քարերի քննական հաշվարկը ....................................... 3
3. գլանաձեւ երկրաչափական պարամետրերի որոշում
շարժիչներ ................................................. ............ .. 6
4. Կտրուկ շարժիչների երկրաչափական հաշվարկը ... ... ... 9
5. Երկրաչափական չափերի որոշում եւ հաշվարկ
թողունակության հզորություն ......................................................... .11
6. Հաշվի հաշվարկի ստուգում ................................ .16
7. Վկայականների ցանկը ................................. 18
Հաղորդալարերի տուփ - մեխանիզմ, որը բաղկացած է հանդերձում կամ ճիճվից
առանձին կցվում է բնակելի տանիքին: Հաղորդման տուփ
նախատեսված է նվազեցնել հեղափոխությունների քանակը եւ, համապատասխանաբար, մեծացնել պտտումը:
Փոխանցման տուփերը բաժանված են հետեւյալ հատկանիշներով.
Տրանսֆերտի տեսակով `ատամնավոր, ճիճու կամ հանդերձամոլ:
Մեկ փուլով (երբ փոխանցումը իրականացվում է մեկ զույգի կողմից), երկու, երեք կամ բազմաբնույթ փուլերով.
Գլանների տեսքով `գլանաձեւ, կոնաձեւ կամ կոնաձեւ գլանաձեւ;
Տիեզերական հենակետերի տեղադրությունը `հորիզոնական, ուղղահայաց, հակված է.
Կինեմատիկական սխեմայի առանձնահատկությունների համաձայն, «զարգացած, համակողմանի վրա.
1. Կինեմատիկական սխեմաների վերլուծություն
Մեր մեխանիզմը բաղկացած է էլեկտրական շարժիչից (1), միակցիչով (2), խթանիչ հանդերձում (3), խթանող անիվները (4), փաթաթված հանդերձը (5), փաթաթված հանդերձը (6), հանքերի (7,6,9) եւ երեք զույգերի շարժակազմի առանցքակալներ: Հզորության վրա հիմնված N 3 = 9.2 կՎտ, անկյունային արագությունը n 3 = 155 ռ / ժ, drive- ը նախատեսված է շարունակական շահագործման համար, թույլատրելի արագության շեղումը
5%,
2. Կինեմատիկ քաշի հաշվարկ
2.1. Որոշեք drive- ի ընդհանուր արդյունավետությունը
h = h 1 * h 2 * h 3 3 * h 4Ըստ աղյուսակի 5-ի (1) մենք ունենք
h 1 = 0,93 - արդյունավետության խթանող գլանաձեւ փոխանցում;
h 2 = 0.9 - արդյունավետություն կոնաձեւ փոխանցումներ;
h 3 = 0,98 - շարժակազմի շարժիչների արդյունավետությունը;
h 4 = 0,98 - կապակցման արդյունավետությունը
h = 0.93 * 0.98 3 * 0.9 * 0.98 = 0.77
2.2. Որոշեք շարժիչի շարժիչ ուժը
N DV = N 3 / h = 11.9 կՎտ
2.3. Ընտրեք շարժիչի տեսակը, համաձայն սեղանին 13 (2): Սա շարժիչն է
A62, 14 կվտ հզորությամբ մոտակա մեծ էներգիայի արժեքով: Այս անվանական արժեքի արժեքը համապատասխանում է 1500 ռ / վ արագության արագությանը:
2.4. Որոշեք փոխանցման հարաբերակցությունը քշել
i = i nom / n 3 = 1500/155 = 9.78
2.5. Քանի որ մեր մեխանիզմը բաղկացած է փակ գլանաձեւ փոխանցման եւ բացից կաշվե հանդերձումապա կոտրել փոխանցման համարը երկու բաղադրիչի մեջ.
2.6. Մենք նշում ենք ընդհանուր փոխանցման հարաբերակցությունը
i = g.5 * 4 = 10
2.7. Որոշեք ելքային լարման ռոտացիոն արագության առավելագույն թույլատրելի շեղումը
- թույլատրելի արագության շեղում առաջադրանքով:2.8. Արդյունքների լարման թույլատրելի ռոտացիոն արագությունը `հաշվի առնելով շեղումները
2.9. Իմանալով մասնավոր տրավմատիկ գործակիցները որոշում են յուրաքանչյուր լիսեռի ռոտացիայի հաճախականությունը.

Այսպիսով, արտադրության լիսեռի պտտման արագությունը գտնվում է ընդունելի սահմաններում:
2.10. Որոշեք մեխանիզմների բեւեռների փոխանցված ոլորողը, հաշվի առնելով հանդերձանքի հարաբերակցությունը եւ արդյունավետությունը.

2.11 Նմանապես, մենք որոշում ենք հանքերի փոխանցված հզորությունը:
2.12. Կառուցեք քաշի ցցերի վրա թորման եւ ուժի բաշխման գրաֆիկ

3. Սահմանում երկրաչափական պարամետրերը խթանիչ հանդերձում
3.1. Ստանդարտ բնօրինակ կոնտուրի անիվների համար, առանց կտրելու գործիքը (x = 0), խորհուրդ է տրվում ընտրել 22-ից 26 ցածր գոտիների ատամները: Ընտրեք Z 1 = 22
3.2. Անիվի ատամների քանակը `
Z 2 = Z 1 * i 1 = 22 * 4 = 88
3.3. Որոշեք կենտրոնի հեռավորությունը բանաձեւով

որտեղ K ա - օժանդակ գործոնը, որը պարունակում է պտուտակներ, 43:
- 9-րդ կետի 3-րդ կետի համաձայն սահադաշտի նկատմամբ սիմետրիկորեն տեղակայված պսակային հանդերձանքի լայնությունը հարաբերական է 0.4-ին: - հանդերձանքի հարաբերակցությունը;T 2 - ցածր արագության լիսեռի շտկում.
Աղյուսակ 3.1 (3) սահմանում է շարժիչների համար պողպատի դասարանը `40X: կարծրություն > 45HRC- ի համար `40X: կարծրություն
350NB:Ըստ աղյուսակի 3.2 (3) հանդերձանքի
Կենտրոնի հեռավորությունը ոչ ստանդարտ շարժակների համար ստացված արժեքը կլորացվում է մոտավոր նորմալ գծային հարթության վրա `A = 100 մմ:
3.4. Որոշեք փոխանցման մոդուլը բանաձեւով
որտեղ Km- ը օժանդակ գործակից է, kosozuby հանդերձանքի համար `5.8;
Մոդուլի ստացված արժեքը կլորացվում է մինչեւ ստանդարտի ստանդարտը p.59 (3): Իշխանության համար շարժիչներ երբ անիվների մեկի կարծրությունը\u003e 45HRC: մոդուլը ընդունված է\u003e 1.5: հետեւաբար, մենք ընդունում ենք m = 2 մոդուլը:
3.5. Որոշեք ուղղահայաց հանդերձի ատամների տեսքը.
3.6. Սահմանել ուղղահայաց շարժակների ընդհանուր հատվածը եւ ատամները
Արդյունքում արժեքը կլորացվում է ամբողջ թվով, այսինքն `Z = 100:
3.7. Որոշեք փոխանցման ատամների քանակը
3.8. Որոշեք անիվի ատամների քանակը
Z 2 = Z - Z 1 = 100 - 20 == 80
3.9. Մենք որոշում ենք իրական փոխանցման փոխարժեքը եւ ստուգում դրա շեղումը:
հետեւաբար հանդերձանքի հարաբերակցությունը ճիշտ է:
3.10. Մենք որոշում ենք հիմնականը երկրաչափական պարամետրեր փոխանցումներ եւ աղյուսակներ
| Պարամետրեր | Բանաձեւեր | Անիվ | |
| 1 | Ատամների քանակը | Z 2 | 80 |
| 2 | Մոդուլը նորմալ է, մմ | m n = m | 2 |
| 3 | Normal չափը, մմ | 6,28 | |
| 4 | Աղբյուրի կոնտուրի անկյունը | ||
| 5 | Ատամների անկյուն | ||
| 6 | Դեմքի մոդուլ, մմ | 2,03 | |
| 7 | Դեմքի ընդլայնում, մմ | 2,03 | |
| 8 | Ատամի գլխի հարաբերակցությունը | Հ | 1 |
| 9 | Ատամի ատամի հարաբերակցությունը | Rn\u003e 1 | 0.25 |
| 10 | Քառակուսի շրջանակի տրամագիծը, մմ | d = Z * m t | 162.4 |
| 11 | Ատամի բաժանող գլուխ բարձրությունը, մմ | h a = h * m | 2 |
| 12 | Ատամի բաժանող ոտքի բարձրությունը, մմ | H f = (h + C) * մ | 2,5 |
| 13 | Ատամի բարձրությունը, մմ | h = h a + h f | 4.5 |
| l4 | Պտտվող շրջանակի տրամագիծը, մմ |
d a = d + 2 h a | 166.4 |
| 15 | Խողովակների շրջանակի տրամագիծը, մմ | d f = d - 2h f | 155,4 |
| 16 | Կենտրոն հեռավորությունը, մմ | A = 0.5 (d 1 + d 2) | 100 |
| 17 | Crown լայնությունը, մմ | 40 |
4. Կտրուկ հանդերձանքի երկրաչափական հաշվարկը
4.1 սահմանում անիվի սկիպիդար տրամագիծը

V N - կոնյակի անիվների տեսակի գործակիցը, խթանման համար հավասար է 1:

Անիվի արտաքին մակերեսի տրամագծի արժեքը կլորացվում է աղյուսակ 13.15-ի (3) նորմալ գծային հարթությունների շարքից մինչեւ մոտակա արժեքը:
d e = 250 մմ
4.2. Սահմանել կոնսեների շարժակների եւ անիվների բաժանման անկյունները

4.3. Որոշեք արտաքին կծիկի հեռավորությունը
4.4. Որոշեք օղակաձեւ հանդերձանքի լայնությունը

4.5. Որոշեք արտաքին շրջանառության մոդուլը
որտեղ K f b - գործակիցը, հաշվի առնելով թագի լայնությունը բեռնվածքի բաշխումը, հավասար է 1; (3)
V f = 0,85 - անկյունային անիվների ձեւի գործակիցը: (3)
Քանի որ փոխանցումը բաց է, մենք ավելացնում ենք մոդուլի արժեքը 30% -ով, այսինքն, m = 5 մմ:
4.6. Որոշեք անիվի եւ հանդերձանքի ատամների քանակը

4.7. Որոշեք իրական փոխանցման հարաբերակցությունը:
4.8. Որոշեք շարժակների եւ անիվների արտաքին տրամագծերը.
բաժանողը
;ատամների գագաթները
= 109.28 մմ; = 253.71 մմ;ատամի փոսերը
միջին տրամագիծը
=85,7 մմ;5. Երկրաչափական չափերի որոշում եւ ելքային լարման ուժի հաշվարկ
5.1. Որոշեք կոնաձեւ կոնստրուկցիաների կառուցման գործում գործող ուժերը.
թաղամաս
ճառագայթ
= 612 N, = 1530 ն.5.2 Ընտրեք լիսեռի նյութը ըստ աղյուսակի 3.2 (3): Սա 45 պողպատի բարելավվել է հետեւյալ մեխանիկական հատկանիշներով.
թույլատրելի ցիկլային սթրես
5.3. Մոտավորապես որոշում են յուրաքանչյուր լիսեռի երկրաչափական չափերը.
Outlet Diameter

Վերցրեք d 1 = 45 մմ:
Այս հիման վրա մենք ենթադրում ենք երկաթի տրամագիծը d2 = 50 մմ տրամագծով:
5.4. Մենք նախընտրում ենք նախահարձակող կրիչները: Աղյուսակ 7.2 (3) բշտիկի հանդերձանքի համար, երբ n<1500 об/мин применяется подшипник роликовый конический однорядный. Выбираем типоразмер подшипника по величине диаметра внутреннего кольца, равного диаметру d 2 = 50мм. Это подшипник легкой широкой серии 7510: d = 50мм, D = 90мм, Т = 25 мм, угол контакта 16 0 , C r =62 kH.
5.5. Ուղղահայաց քայլերը նկարագրում ենք կողմնորոշման հաշվարկում ձեռք բերված չափերի եւ որոշում են առանցքակալների ռեակցիաների կիրառման կետերի միջեւ հեռավորությունները:
5.6. Ձեռք բերեք անջրանցիկ գործիքի ուժերի դիագրամ:
5.7. Որոշեք ռեակցիայի աջակցությունը.
ա) ուղղահայաց հարթություն

բ) կառուցել A, B, C բնութագրական հատվածներում կռում պահեր (Նկար. 5.1)
գ) հորիզոնական հարթություն
Ստուգեք ` ![]() = 160 ՄՊա - պողպատի լիսեռի թույլատրելի սթրեսային արժեքը:
= 160 ՄՊա - պողպատի լիսեռի թույլատրելի սթրեսային արժեքը:
Շարժիչի տակ գտնվող լիսեռի արժեքը մոտավոր է մոտակա ստանդարտին
Հաշվարկի արդյունքում մենք կնվազեցնենք լիսեռի տրամագիծը անիվի տակ 45 մմ:
5.12 Հաշվարկել կտրելու եւ ջարդելու բանալին:
Անիվների բռնակները ամրացնելու համար օգտագործվել է splines. Պրիսմատիկ բանալիների չափերը որոշվում են կախված լիսեռի տրամագծից `ըստ ԳՕՍՏ 23360-78, b * h = 14 * 9 մմ, 1 = 38 մմ:
5.13. Բորբոքված վիճակում գտնվող ուժի վիճակը ստուգվում է բանաձեւով
որտեղ T- ն է լիսեռով փոխանցված մոմենտը.
- թույլատրելի սթրես աղյուսակում 3.2 (3) 260 N / mm 25.14. Կտրուկի դեֆորմացման ուժի պայմանը ստուգվում է բանաձեւով
6. Առանցքակալների հաշվարկի ստուգում
6.1. Առանցքակալների համապատասխանությունը որոշվում է հաշվարկված դինամիկ բեռնվածքի հզորությունը բազային բեռի հետ համեմատելով: Հաշվարկների արդյունքում մենք ունենք. Լիսեռի անկյունային արագությունը
ցանցի մեջ առանցքային ուժ - F ա = 1530 N, ռեակցիաները առանցքակալների վրա - R XB = 3400 N, R YB = 7557 N. Հաշվարկի արդյունքում մենք պետք է նվազեցնենք նախկինում ընտրված կրողը, այսինքն լայնածավալ 7508 շարքը, որը կրում է առանձնահատկություններ `d = 40 մմ, D = 80 մմ, T = 25 մմ, Ս r = 56 kN, ε = 0,381, Ու = 1,575, շփման անկյունը 14 ° է:Առանցքակալները տեղադրվում են սխեմայի համաձայն:
6.2. Որոշեք ճառագայթային ռեակցիաների առանցքային բաղադրիչները
R g1 = 0.83 ե R BY = 0.83 * 0.381 * 3400 = 1188 H,
R g2 = 0.83 ե R BX = 0.83 * 0.381 * 7557 = 2640 H,
6.3. Որոշեք առանցքային բեռնվածքի կրողը
R a1 = R s1 = 1188 N, R a2 = R s1 + F a = 2718 H.
6.4. Որոշել հարաբերությունները `
որտեղ V ռոտացիոն գործակիցն է: Երբ պտտում է կրողի ներքին օղակը, ըստ աղյուսակի: 9.1 (3) V = 1:
6.5. 0.35 հարաբերակցությամբ< 0,381 и 0,36 < 0,381 выбираем формулу для определения эквивалентной динамической нагрузки, воспринимаемой подшипником, R e ; R e = VR r K g K T ,
K g - անվտանգության գործակիցը, ըստ աղյուսակի 9.4 (3) K g = 1.2,
K T - ջերմաստիճանի գործակից, ըստ աղյուսակի: 9.5 (3) = 1, ապա K T
R e = 1 * 3400 * 1.2 * 1 = 4080 H,
6.6. Որոշեք դինամիկ վերելակների հզորությունը
որտեղ L h - կրողի երկարատեւ շահագործմամբ պահանջվող երկարատեւությունը, ստացվում է 5000 ժամ
C rp< С r , значит подшипник пригоден к применению.